Hi Team,
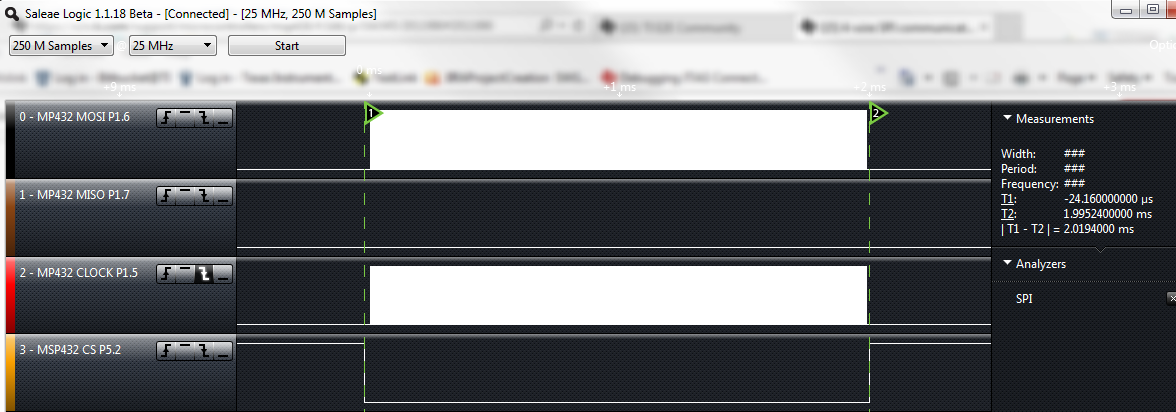
I am trying to establish SPI communication between MSP432 and CC1310 radio using the 4-wire concept for MSP432.
The MSP432 is acting as Master SPI and CC1310 to be acting as Slave SPI.
The example code for SPI MSP432 is based on 3-wire.
I am finding it hard to convert it o 4-wire. As I want to use the CS concept for MSP432 I tried to modify the code.
But the hardware attribute structure defined in the "MSP_EXP432P401R.c" file does not have the element where we can mention whic pin is used as CS.
the same thing is available for SDSPI peripheral.
Please will need your guidance to make SPI 4-wire communication to be established on the MSP432 using RTOS.
The CC1310 is already designed to act as Slave and it is working fine.
Thank you
Vikram