Announcing the release PRTOS, an open-source preemptive real time operating system kernel for bare-metal applications.
PRTOS is released by Cleveland Engineering Design - the developer of the CoRTOS cooperative real time OS, also available on Sourceforge.
PRTOS presently supports the MSP430 and AVR architectures.
PRTOS is available on Sourceforge at https://sourceforge.net/projects...
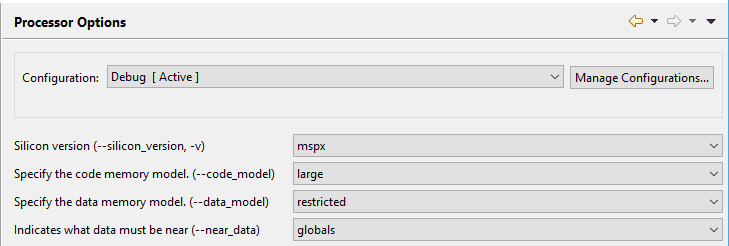
PRTOS has one of the smallest footprints of any true preemptive system: 4.3kB with all the features below (ti MSP430 compiler, no optimizations);
- Only 950 lines of code implement all of the RTOS features (SLOC-L);
- The system is configurable, you include only the features you need;
- There is minimal to zero interrupt burden;
- The system is well documented with a short but comprehensive manual, well-commented source code, and a test suite demonstrating the features;
- The system is proven - it has been in use since 1982 with applications in in-vitro medical equipment, process control instrumentation and industrial machinery;
- It is released under a GPL V3 license and commercial licensing is available.
PRTOS provides the following features:
Scheduling
- Preemptive
- Prioritized
- Round-robin equal priority tasks
Task Control
- Initialize/Ready
- Suspend/Resume
- Lock/Unlock
- Change priority
- Relinquish a round-robin turn
Communication
- Messages, priority messages
- Signals
Delay & Time
- Task delays
- Time-outs
- Periodic signals
- Run timers
Resources (semaphores/mutexes)
- Multiple resource ownership
- Priority inversion mitigation
- Priority or FIFO queuing
ISR -> task functions
- Send signal
- Send message, send priority message
- Resume task