


Hi, I would like to connect MSP430F5438A with the MPRLS pressure sensor via I2C.
The crystal I used is 29.5 MHz, and I use UCB1CLK and UCB1SDA.
I tried the I2C example code "msp430x54xA_uscib0_i2c_06.c" to ensure that MSP430 can send the data out.
However, I found that the code always stop in the interrupt vector.
Especially it will stop in
Here is my code:
#include <msp430.h>
#define CRYSTAL_295
unsigned char TXData;
unsigned char TXByteCtr;
void init_clock(void);
int main(void)
{
int i;
//WDTCTL = WDTPW + WDTHOLD; // Stop WDT
init_clock();
P3SEL |= BIT7; // Assign I2C pins to USCI_B0
P5SEL |= BIT4;
__disable_interrupt();
UCB1CTL1 |= UCSWRST; // Enable SW reset
UCB1CTL0 = UCMST + UCMODE_3 + UCSYNC; // I2C Master, synchronous mode
UCB1CTL1 = UCSSEL__SMCLK + UCSWRST; // Use SMCLK, keep SW reset
UCB1BR0 = 12; // fSCL = SMCLK/12 = ~100kHz
UCB1BR1 = 0;
UCB1I2CSA = 0x18; // Slave Address is 048h
UCB1CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
for(i=0;i<100;i++) {};
UCB1IE |= UCTXIE; // Enable TX interrupt
TXData = 0x01; // Holds TX data
while (1)
{
TXByteCtr = 1; // Load TX byte counter
while (UCB1CTL1 & UCTXSTP); // Ensure stop condition got sent
UCB1CTL1 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
__no_operation(); // Remain in LPM0 until all data
// is TX'd
TXData++; // Increment data byte
}
}
//------------------------------------------------------------------------------
// The USCIAB0_ISR is structured such that it can be used to transmit any
// number of bytes by pre-loading TXByteCtr with the byte count.
//------------------------------------------------------------------------------
#pragma vector = USCI_B1_VECTOR
__interrupt void USCI_B1_ISR(void)
{
switch(__even_in_range(UCB1IV,12))
{
case 0: break; // Vector 0: No interrupts
case 2: break; // Vector 2: ALIFG
case 4: break; // Vector 4: NACKIFG
case 6: break; // Vector 6: STTIFG
case 8: break; // Vector 8: STPIFG
case 10: break; // Vector 10: RXIFG
case 12: // Vector 12: TXIFG
if (TXByteCtr) // Check TX byte counter
{
UCB1TXBUF = TXData; // Load TX buffer
TXByteCtr--; // Decrement TX byte counter
}
else
{
UCB1CTL1 |= UCTXSTP; // I2C stop condition
UCB1IFG &= ~UCTXIFG; // Clear USCI_B0 TX int flag
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
}
break;
default: break;
}
}
/*********************************************************************
Function : init_clock
Purpose : Initial system clock
Parameter : none
Return value : none
*********************************************************************/
void init_clock(void)
{
unsigned int i;
WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timer
P5SEL |= 0x0C; // Port select XT2
UCSCTL6 &= ~XT2OFF; // Enablee XT2 even if not used
#ifdef CRYSTAL_295
UCSCTL6 |= 0xC000; // Enablee XT2 even if not used
#endif
UCSCTL3 |= SELREF_2; // FLLref = REFO
UCSCTL4 |= SELA__XT2CLK;//Select source fromXT2-16M
UCSCTL4 |= SELS_5 + SELM_5; // SMCLK=MCLK=XT2-16M
_NOP();
#ifdef CRYSTAL_295
UCSCTL5 |= DIVM__2 + DIVS__32+ DIVA__2; // Crystal -> 29.5MHz
#endif
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG);// Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
for(i=0;i<0xFFFF;i++); // Delay for Osc to stabilize
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
}
I use IAR Embedded Workbench IDE and set the breakpoint to check the problem.
I am sure it will go into the interrupt vector as follows:
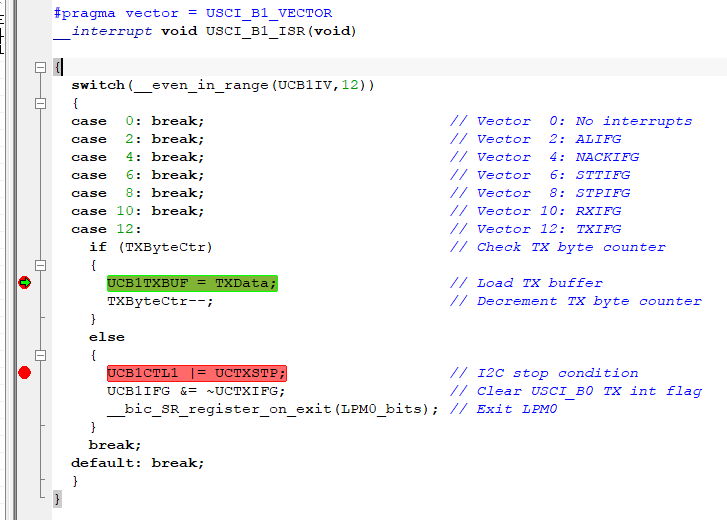
However, if I click "go" to continue the program, it won't go into the next breakpoint: UCB1CTL1 |= UCTXSTP
I have no idea what's going on...Is there anyone can help me with this issue?
Thank you very much in advance!
Michelle

