Other Parts Discussed in Thread: SYSCONFIG, MSP432E401Y
Hello TI-Community,
i am trying to get my position and velocity from an encoder. I am using the MSP-EXP432E401Y (TI-RTOS).
The descriptions showed, that I have to use the QEI driverlib (Quadro Encoder Interface).
And the manual defines the relevant ports for Channel A and B are:
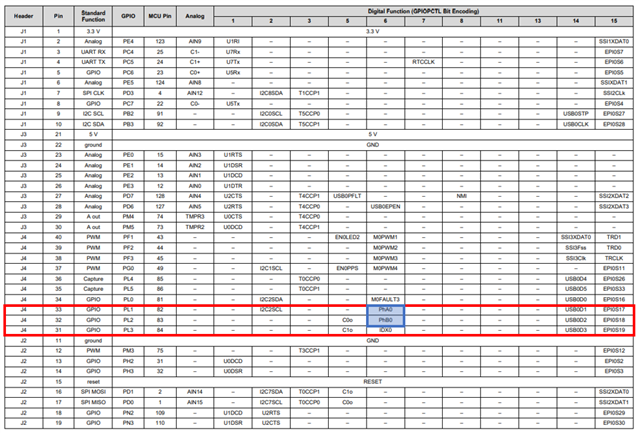
Channel A -> PhA0 -> GPIO 82
Channel B -> PhB0 -> GPIO 83
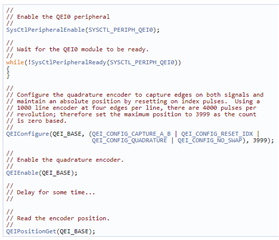
I found the following example (but i dont get it):
https://www.programmersought.com/article/38824307895/
I tried to run it. But i don't understand the example and especially where the ports are defined.
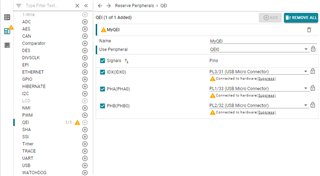
I tried to add the given GPIO Pins in the syscfg-file:
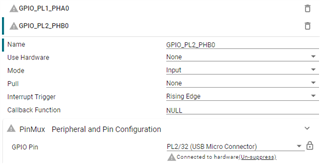
but it throws a warning:
#48-D incompatible redefinition of macro "GPIO_PL1_PHA0" (declared at line 54 of "C:/Users/psc/workspace_v10/gpiointerrupt_MSP_EXP432E401Y_tirtos_ccs/Debug/syscfg/ti_drivers_config.h") .ccsproject /gpiointerrupt_MSP_EXP432E401Y_tirtos_ccs line 284, external location: C:\ti\simplelink_msp432e4_sdk_4_20_00_12\source\ti\devices\msp432e4\driverlib\pin_map.h C/C++ Problem
I am new to the ti products and therefore this question is probably obvious. I still hope that somebody can help me.
A small code snippet and a description would be helpful.
With best regards
Patrick