


Tool/software: Code Composer Studio

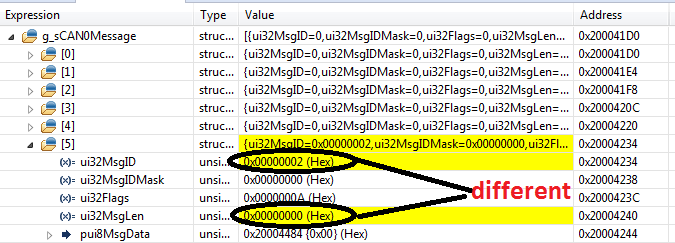
This picture is Config Message CAN[5].
After interupts, I call: CANMessageGet(CAN0_BASE, 6, &g_sCAN0Message[5], 0);
Then the ID and Length is repaired because in funtion CANMessageGet: ( to 2 and 0 )
ui16CmdMaskReg = (CAN_IF1CMSK_DATAA | CAN_IF1CMSK_DATAB |
CAN_IF1CMSK_CONTROL | CAN_IF1CMSK_MASK |
CAN_IF1CMSK_ARB);
psMsgObject->ui32MsgID = (ui16ArbReg1 & CAN_IF1ARB2_ID_M) >> 2;
Next time: the interuupst still appear and CANMessageGet(CAN0_BASE, 6, &g_sCAN0Message[5], 0); still call
I dont know why, please help me

