Other Parts Discussed in Thread: DRV8711
After Service Ticket no.: Number: CS0554686
Hello,
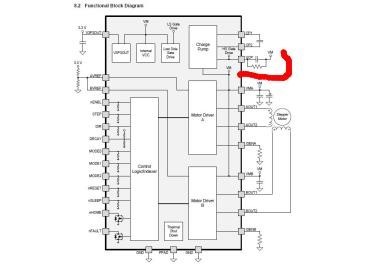
WE got a very strange and thorny phenonmenon with DRV8825 driving stepping motor.
1. Phenonmenon
- The motor loses steps after continous running on a product in mass production
- Failure rate: 20% with the same batch of DRV8825
- Experiments did to try different batches of DRV8825, the failure gone or down to very low failure rate
- Max. step lose: 100 full steps in 48 hours (continous running)
2. Working conditions
- Speed: 750rpm
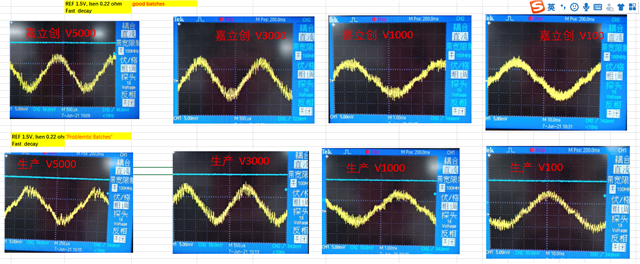
- Decay mode: fast
- Peak phase Current: 1.2A
- Micro-stepping: 1/8
3. Experiments did
- Tried different baches of DRV8825:
- the high failure rate batches: 05TG5AV7T, 06TG5A1JL,0CTG5CCRC .
- low failure rate (or woking well) batches:12TG5 AXC7
- Swaped the different batches of DRV8825 on the same PCBA board, good batch still good, and "bad" batch still does not work.
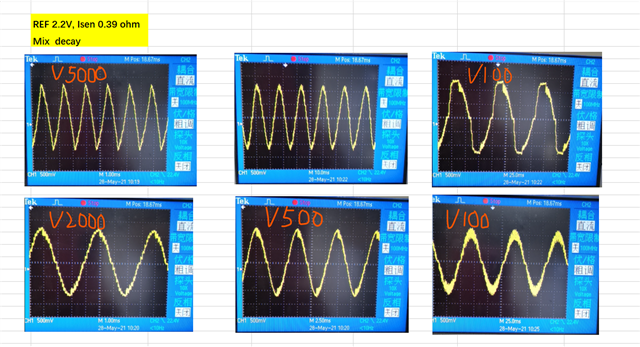
- We tried the mix decay mode, the failure rate sharply reduced, still monitor it.
It is quite urgent and as the mass product is down. Please help look at it and looking forward to your any suggestion or feedback. So appreciated!


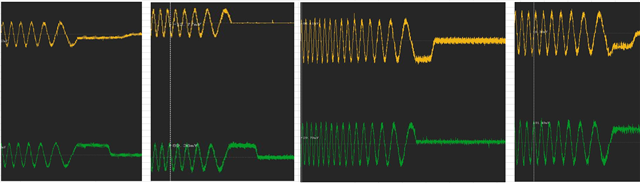
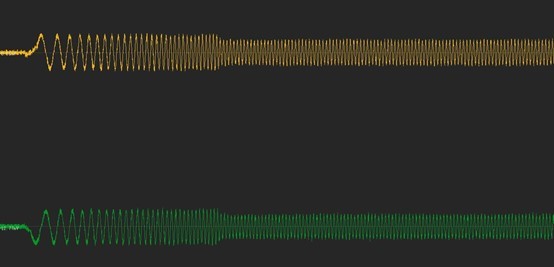
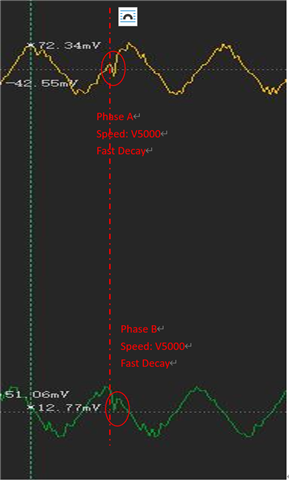 could not undersatnd, why there is current drops on the phase A and B with FAST DECAY.
could not undersatnd, why there is current drops on the phase A and B with FAST DECAY.