Other Parts Discussed in Thread: DRV8711
Dear Expert
Before and after batch proofing accumulated 120~140 PCS, accumulated various failures of 10~20PCS;
Among them, after initialization, the maintaining current is very high, 2~3PCS appear, usually about 10S, the motor can be damaged, oscilloscope grasp the current waveform, prompting the measured value is out of range, oscilloscope enters the protection mode,
If you continue to let the motor carry, the driving sampling resistance will be burned;
Condition 1. If the power-on is normal and the torque is maintained, the motor only needs to run for a while and immediately enters protection, and fault code 0Xe4 (Channel B failure) is reported.Power on the system again to recover the available state. After running, the fault occurs from time to time.
Condition 2. If no fault is reported after the driver chip is initialized, the fault code 0x22 (Channel B &A failure) is reported as long as the STEP is run.Power on again;

Condition 3,.inexplicably and irregularly there is no torque (the sensation triggers the protection mechanism), power on again and restore to normal;
Part of the board, the drive circuit of the periphery is almost replaced, the fault code still exists.
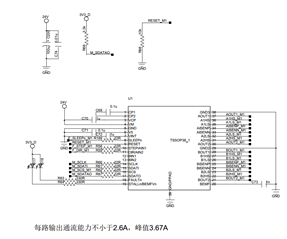
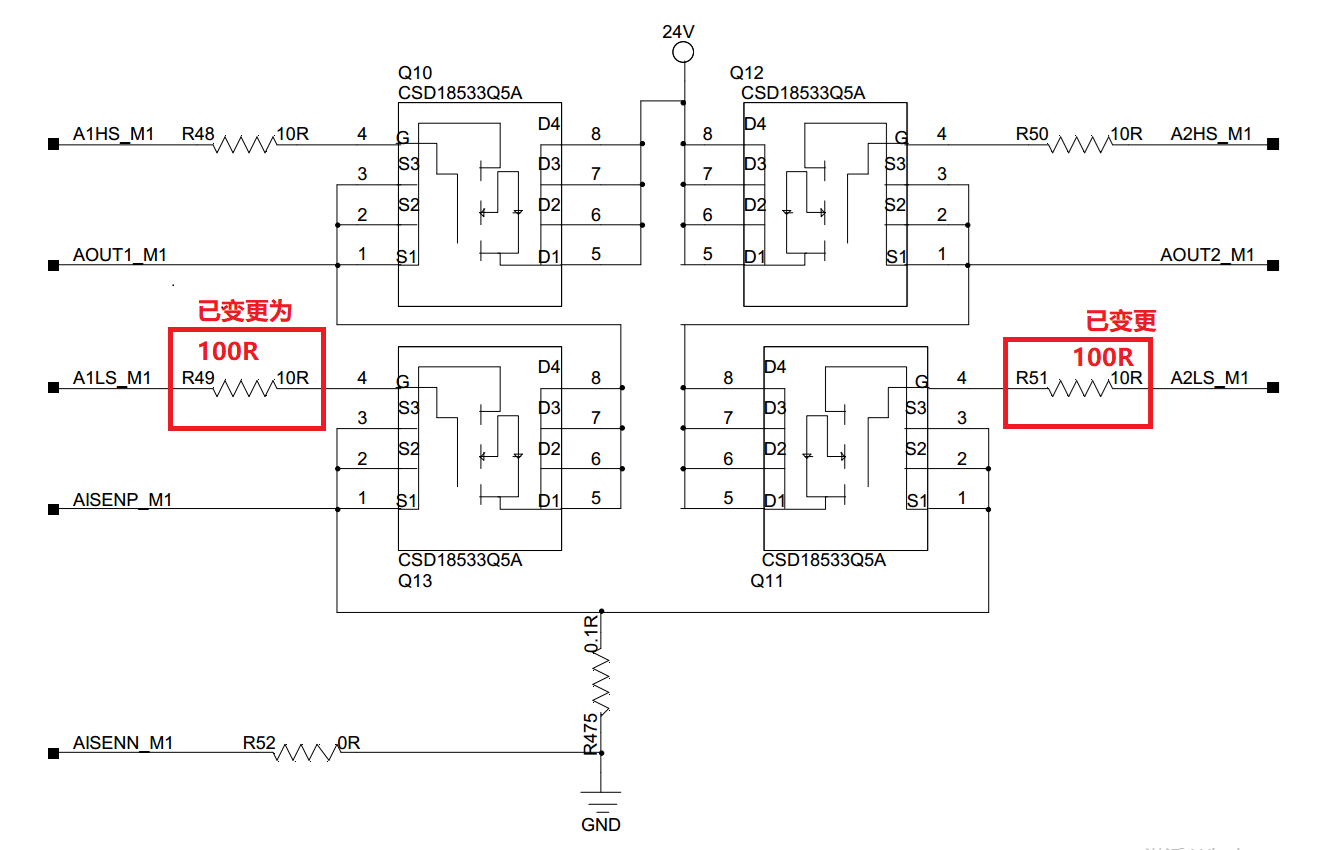
Below is shcemetic :
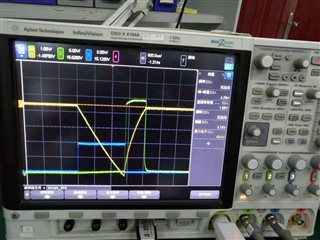
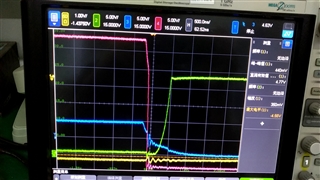
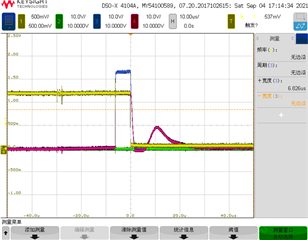
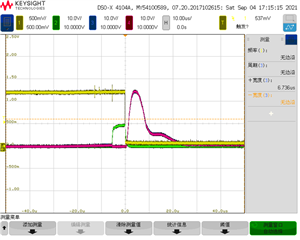
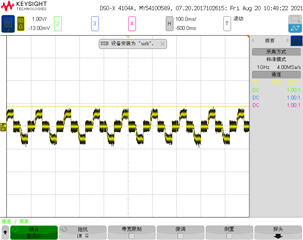
Below is channel B tested high side and lowside gate waveform:
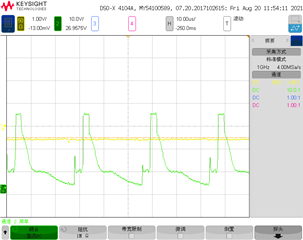
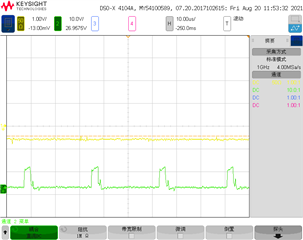
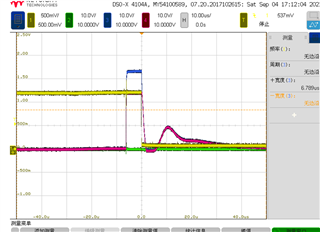
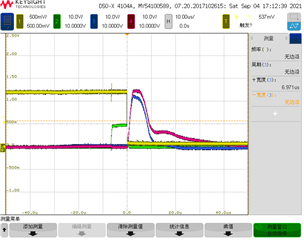
this is the channel B is current waveform:
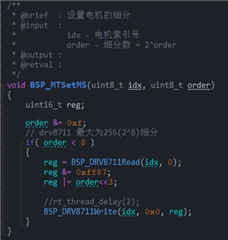
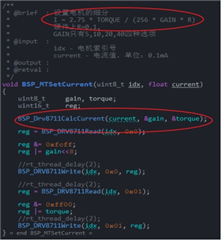
Register we just set ENBL ,MODE ,ISGAN ,TORQUE,