Dear Expert
Our motor is a rated motor voltage 5V, maximum voltage 5.5V;Rated speed 12000rpm, maximum speed 135000rpm;Rated current 400mA, maximum current 550mA;Phase resistance 6.5± 10% ω;Three-phase dc brushless motor .
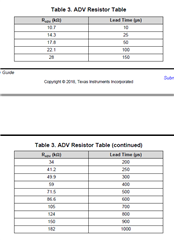
DRV10974 set:Rcs=7.32KΩ,Radv=59KΩ,Rrmp=17.8KΩ
Below is phase current:

Could u give some advice about how to enter open loop?