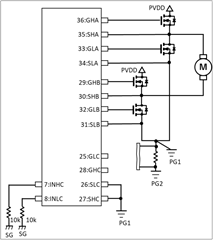
Can the DRV8305-Q1 be used with a brushed motor (single phase)?
If Yes, the remaining 1 phase terminals (GH_C, SH_C, GL_C, SL_C)
Is it okay to process empty terminals with OPEN?
Regards
Kura
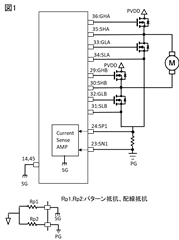
Can the DRV8305-Q1 be used with a brushed motor (single phase)?
If Yes, the remaining 1 phase terminals (GH_C, SH_C, GL_C, SL_C)
Is it okay to process empty terminals with OPEN?
Regards
Kura