


Hello TI experts,
My customer made their product using DRV2624 and LRA motor, and they found a problem.
first they tested as the diagram below.
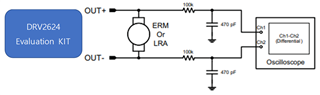
the problem is, when the voltage into the motor is 2.5Vrms, motor works normally.
but if the voltage is under 1.6Vrms, some motors do not work correctly, and under 1.0Vrms most motors do not work correctly.
they use Auto resonance tracking(Auto calibration/RTP mode), in this time DRV2624 cannot trace resonance frequency and this frequency keep changing.
if they disable Auto resonance tracking and use open loop method, motors work correctly.
here is the waveform that is work correctly and not correctly.
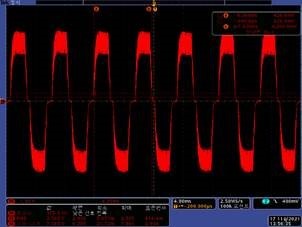
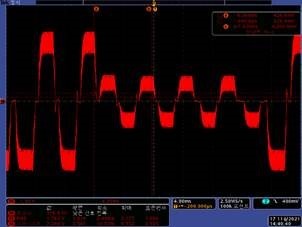
(left is work correctly, right is don't.)
and here is another question.
1. when the motor is first working with Auto resonance tracking(closed loop), is it possible to work with first verified resonant frequency until the motor is powered off?
2. we do not want to change the first resonant frequency in Auto resonance tracking. is it possible to control if the frequency is changed?
3. Is it possible to control the range of frequency tracking after verification of first resonant frequency?
please check these issues, and let me know if you need more about this problem. Thanks,
Best regards,
Chase
