The circuit designed according to the current detection in the manual is also calculated according to the corresponding formula. The current situation is that the measured results do not correspond to those calculated by the formula.
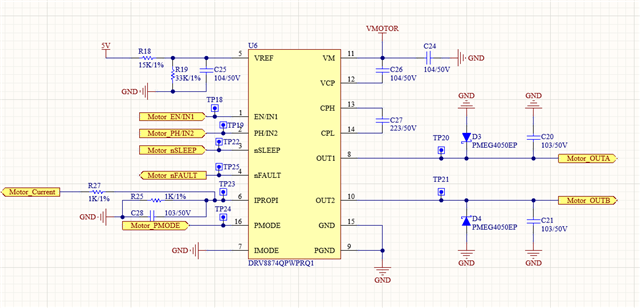
At present, the chip is configured as PWM control mode, IN2 is set as low level, IN1 is driven by 20kHz and 60% duty cycle, RIPROPI= 1K, and the measured VIPROPI = 0.044v. According to the formula, the converted current is 97.78ma, but the motor current detected by the actual ammeter is 48.7mA.
The motor current and VIPROPI voltage under 50% ~ 100% PWM drive are measured. The formula conversion does not correspond to the actual measured current.
What's the reason?