Hello Team,
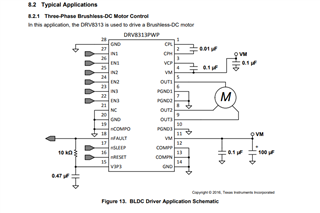
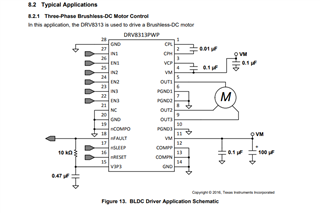
I designed PCB same as the ficture below.
My motor works but stops with nfault problem in a few seconds.
The nfault level drops to low.
Should I fix the schematic?
What issues should I confirm?
Thanks,
Robert.
Original question:

Hello Team,
I designed PCB same as the ficture below.
My motor works but stops with nfault problem in a few seconds.
The nfault level drops to low.
Should I fix the schematic?
What issues should I confirm?
Thanks,
Robert.