Other Parts Discussed in Thread: DRV8801,
We recently replaced Allegro A3977SLP driver by the DRV8818 on existing boards. The boards are shipped with A3977SLP for several years now and sofar we never had problems.
But now with the DRV8818 the motor makes unusual noise when motor is not running but hold current is active to keep motor in its position.
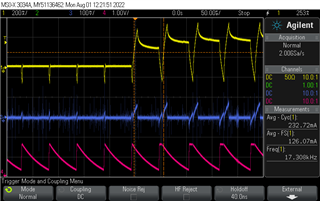
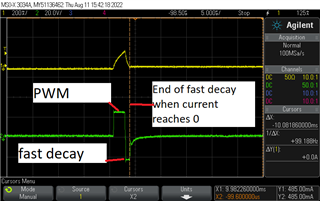
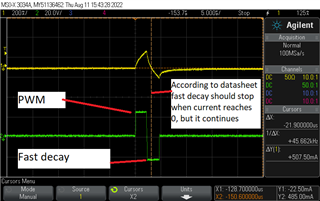
Measurements with the scope showed us jitter on the hold pulses to the motor coils.The jitter had to be related to the current measurement part of the motor driver, because the motor is not moving, so the step sequencer is not active. We measured the old situation with A3977SLP and compared our results with DRV8818 results.
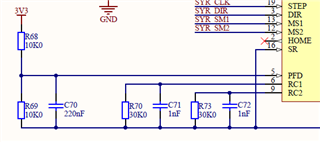
We saw a difference in blanking time. Based on our measurements, we narrowed down the cause of the sound to the RC networks RC1 and RC2 on pins 6 and 9 of the motor driver in combination with the filter capacitors. We changed RC1 and RC2 to 56K and 820 pF. The blanking time is exactly the same as the A3977SLP..These seemed fine on several boards we tested. The noise was gone and we gave green light to modify our stock.
Today we received a first batch of 20 PCB's. Four PCB's passed all tests but the fifth PCB had the same unusual noise.
We can get rid of the noise connecting another motor (same type and specs as the other).
Right now we are staring into the dark. We know for sure that we tuned the motor circuit correctly.
But what is wrong? We never had problems with the A3977SLP.
What is different in the DRV8818 to generate this unusual and unwanted noise?
We have a stop shipment, so we need a fix for it very urgently.
Any help is appreciated.
Thanks
Harm