Other Parts Discussed in Thread: DRV2605
I have some questions about increasing the amplitude of LRA using DRV 2605L haptic motor driver.
Firstly, when I saw the datasheet of it, I think that it is available to adjust the rated-voltage and OD_clamp voltage to increase the amplitude of LRA.
Related to this, I have some questions as below :
(1) I just want to know the difference between adjusting rated-voltage and waveform library effects list.
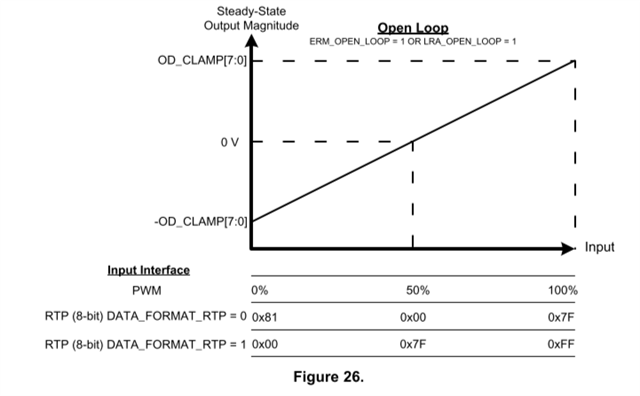
To be specific, when I tried to use the list (effect id no =1, strong click-100%), I just want to find out the solution to increase the amplitude of LRA.
For this reason, I want to figure out the definition of "100%".
(2) Using Arduino and LRA (vibration motor), is it possible to increase the rated-voltage over 5V ?