Hi,
I am working on the HALL to FAST smooth transition issues and discovered both speedRef_Hz and speedEST_Hz was out of sync.
when running under FAST estimator + Current Control mode, set IsRef_A to 2.0, I have both EST and HALL Hz as below
when running under FAST estimator + Speed Control mode, set speedRef_Hz to 438, I have speedEST_Hz = 434 and speedHall_Hz which's like Current Control different.
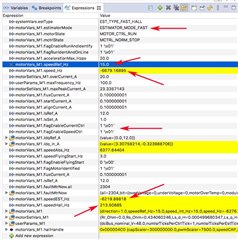
FAST Current Control mode
IsRef_A = 2.0
speedEST_Hz = 438
speedHall_Hz = 31
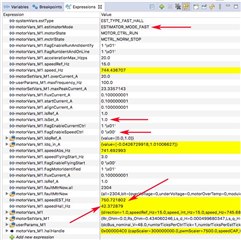
FAST Speed Control mode
speedRef_Hz = 438
speedEST_Hz = 434
speedHall_Hz = 31
now change the estimator to HALL, if IsRef_A set to 2.0, my motor spin like crazy because speedEST_Hz is ramp up to -7495
HALL Current Control mode
IsRef_A = 1.45
speedEST_Hz = 423
speedHall_Hz = 30
IsRef_A = 2.0
speedEST_Hz = -7495
speedHall_Hz = 189
HALL Speed Control mode
speedRef_Hz = 15
speedEST_Hz = -174
speedHall_Hz = 15
IsRef_A = ~1.17
speedRef_Hz = 20
speedEST_Hz = -235
speedHall_Hz = 19
IsRef_A = ~1.32
speedRef_Hz = 120
speedEST_Hz = -7499
speedHall_Hz = 118
IsRef_A = ~1.6
both Speed and Current Control mode under HALL estimator seem to have speedEST_Hz issues
e.g. positive speedHall_Hz have negative speedEST_Hz value, that's noway to make transition !!!!
what's the 7499 upper limit value ?
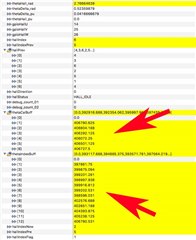
on HALL + Current Control mode, it's jump to its upper limit 7499 see below IsSet_A set to 1.7 and 1.9
on HALL + Speed Control mode, speedRef_Hz higher than 100, speedEST_Hz also jump to -7499
IsSet_A speedHall_Hz speedEST_Hz
1.4 28 -360
1.5 34 -512
1.6 46 -844
1.7 62 -7499
1.8 190 -7499
1.9 190 -7499
Can anyone help to let me know how to make it in-sync.?
Thanks,
Tiger