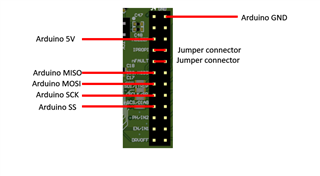
Hi I need support in setting up the board. I have connected the board with Arduino pins
GND - GND
PIN 13 - SCLK
PIN 12 - SDO
PIN 11 - SDI
PIN 10 - nSCS
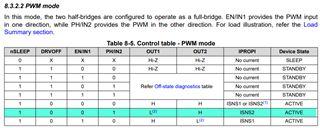
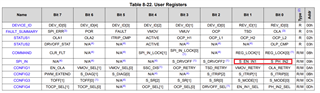
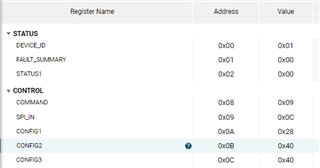
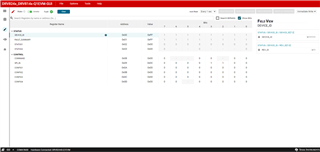
Register Map looks like this:
Can you share a sample Arduino code to drive the motor ? Thanks.
- Ankit