


Other Parts Discussed in Thread: MCF8329EVM
Tool/software:
Hello, Dear TI Engineer, when using 8329 to drive a 5-pole compressor, the motor speed is unstable under the condition of constant load of 20psi (there is a pressure relief valve at the rear end), and there is a fluctuation of 200 rpm, resulting in unstable pressure on the pressure gauge. Try other chip drivers and find that it can be stable. I don't know if it's a problem with 8329 or a problem with its own configuration, it's a json file, please check it out.
{
"signature":"oneui-register-data",
"data":[
[
{
"idx":0,
"id":"ISD_CONFIG",
"value":"0xF4A2D4A1",
"addr":"0x00000080"
},
{
"idx":1,
"id":"REV_DRIVE_CONFIG",
"value":"0x48300000",
"addr":"0x00000082"
},
{
"idx":2,
"id":"MOTOR_STARTUP1",
"value":"0x0E2654C4",
"addr":"0x00000084"
},
{
"idx":3,
"id":"MOTOR_STARTUP2",
"value":"0xAC47C007",
"addr":"0x00000086"
},
{
"idx":4,
"id":"CLOSED_LOOP1",
"value":"0x1678843C",
"addr":"0x00000088"
},
{
"idx":5,
"id":"CLOSED_LOOP2",
"value":"0x8AFD4D41",
"addr":"0x0000008A"
},
{
"idx":6,
"id":"CLOSED_LOOP3",
"value":"0x28CA14B2",
"addr":"0x0000008C"
},
{
"idx":7,
"id":"CLOSED_LOOP4",
"value":"0xB28C87D0",
"addr":"0x0000008E"
},
{
"idx":8,
"id":"REF_PROFILES1",
"value":"0x23218669",
"addr":"0x00000094"
},
{
"idx":9,
"id":"REF_PROFILES2",
"value":"0x5668099B",
"addr":"0x00000096"
},
{
"idx":10,
"id":"REF_PROFILES3",
"value":"0x1F2F9660",
"addr":"0x00000098"
},
{
"idx":11,
"id":"REF_PROFILES4",
"value":"0x0019A6B3",
"addr":"0x0000009A"
},
{
"idx":12,
"id":"REF_PROFILES5",
"value":"0xA67339B8",
"addr":"0x0000009C"
},
{
"idx":13,
"id":"REF_PROFILES6",
"value":"0x007FFFC2",
"addr":"0x0000009E"
}
],
[
{
"idx":0,
"id":"FAULT_CONFIG1",
"value":"0x77F231A6",
"addr":"0x00000090"
},
{
"idx":1,
"id":"FAULT_CONFIG2",
"value":"0x71C22888",
"addr":"0x00000092"
}
],
[
{
"idx":0,
"id":"INT_ALGO_1",
"value":"0x09460015",
"addr":"0x000000A0"
},
{
"idx":1,
"id":"INT_ALGO_2",
"value":"0x00008321",
"addr":"0x000000A2"
}
],
[
{
"idx":0,
"id":"PIN_CONFIG",
"value":"0x40032300",
"addr":"0x000000A4"
},
{
"idx":1,
"id":"DEVICE_CONFIG1",
"value":"0x40100001",
"addr":"0x000000A6"
},
{
"idx":2,
"id":"DEVICE_CONFIG2",
"value":"0x03E8D00C",
"addr":"0x000000A8"
},
{
"idx":3,
"id":"PERI_CONFIG1",
"value":"0x52983E00",
"addr":"0x000000AA"
},
{
"idx":4,
"id":"GD_CONFIG1",
"value":"0x8000807B",
"addr":"0x000000AC"
},
{
"idx":5,
"id":"GD_CONFIG2",
"value":"0x80000066",
"addr":"0x000000AE"
}
],
[
{
"idx":0,
"id":"GATE_DRIVER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E0"
},
{
"idx":1,
"id":"CONTROLLER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E2"
}
],
[
{
"idx":0,
"id":"ALGO_STATUS",
"value":"0x1A5CFFE4",
"addr":"0x000000E4"
},
{
"idx":1,
"id":"MTR_PARAMS",
"value":"0x00000000",
"addr":"0x000000E6"
},
{
"idx":2,
"id":"ALGO_STATUS_MPET",
"value":"0x03000000",
"addr":"0x000000E8"
}
],
[
{
"idx":0,
"id":"ALGO_CTRL1",
"value":"0xAA500000",
"addr":"0x000000EA"
}
],
[
{
"idx":0,
"id":"ALGO_DEBUG1",
"value":"0x428E0000",
"addr":"0x000000EC"
},
{
"idx":1,
"id":"ALGO_DEBUG2",
"value":"0x00000000",
"addr":"0x000000EE"
},
{
"idx":2,
"id":"CURRENT_PI",
"value":"0x030503C8",
"addr":"0x000000F0"
},
{
"idx":3,
"id":"SPEED_PI",
"value":"0x03640264",
"addr":"0x000000F2"
},
{
"idx":4,
"id":"DAC_1",
"value":"0x00000000",
"addr":"0x000000F4"
}
],
[
{
"idx":0,
"id":"ALGORITHM_STATE",
"value":"0x00000000",
"addr":"0x00000196"
},
{
"idx":1,
"id":"FG_SPEED_FDBK",
"value":"0x01435E50",
"addr":"0x0000019C"
},
{
"idx":2,
"id":"BUS_CURRENT",
"value":"0x00000000",
"addr":"0x0000040E"
},
{
"idx":3,
"id":"PHASE_CURRENT_A",
"value":"0xFFF80000",
"addr":"0x0000043C"
},
{
"idx":4,
"id":"PHASE_CURRENT_B",
"value":"0xFF8F0000",
"addr":"0x0000043E"
},
{
"idx":5,
"id":"PHASE_CURRENT_C",
"value":"0x00790000",
"addr":"0x00000440"
},
{
"idx":6,
"id":"CSA_GAIN_FEEDBACK",
"value":"0x00000000",
"addr":"0x00000450"
},
{
"idx":7,
"id":"VOLTAGE_GAIN_FEEDBACK",
"value":"0x00000000",
"addr":"0x00000458"
},
{
"idx":8,
"id":"VM_VOLTAGE",
"value":"0x028B8000",
"addr":"0x0000045C"
},
{
"idx":9,
"id":"PHASE_VOLTAGE_VA",
"value":"0x02A6190E",
"addr":"0x00000460"
},
{
"idx":10,
"id":"PHASE_VOLTAGE_VB",
"value":"0x02A45DA6",
"addr":"0x00000462"
},
{
"idx":11,
"id":"PHASE_VOLTAGE_VC",
"value":"0x02A0E6D7",
"addr":"0x00000464"
},
{
"idx":12,
"id":"SIN_COMMUTATION_ANGLE",
"value":"0xF8749B50",
"addr":"0x000004AA"
},
{
"idx":13,
"id":"COS_COMMUTATION_ANGLE",
"value":"0x02A38318",
"addr":"0x000004AC"
},
{
"idx":14,
"id":"IALPHA",
"value":"0x03220000",
"addr":"0x000004CC"
},
{
"idx":15,
"id":"IBETA",
"value":"0xFF383C9F",
"addr":"0x000004CE"
},
{
"idx":16,
"id":"VALPHA",
"value":"0x0051CC11",
"addr":"0x000004D0"
},
{
"idx":17,
"id":"VBETA",
"value":"0x006AC74A",
"addr":"0x000004D2"
},
{
"idx":18,
"id":"ID",
"value":"0x0197D8DE",
"addr":"0x000004DC"
},
{
"idx":19,
"id":"IQ",
"value":"0x02CD9EDF",
"addr":"0x000004DE"
},
{
"idx":20,
"id":"VD",
"value":"0xFFB62539",
"addr":"0x000004E0"
},
{
"idx":21,
"id":"VQ",
"value":"0x00709108",
"addr":"0x000004E2"
},
{
"idx":22,
"id":"IQ_REF_ROTOR_ALIGN",
"value":"0x00000000",
"addr":"0x0000051A"
},
{
"idx":23,
"id":"SPEED_REF_OPEN_LOOP",
"value":"0x00000000",
"addr":"0x00000532"
},
{
"idx":24,
"id":"IQ_REF_OPEN_LOOP",
"value":"0x02665D58",
"addr":"0x00000542"
},
{
"idx":25,
"id":"SPEED_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x000005D0"
},
{
"idx":26,
"id":"ID_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x0000060A"
},
{
"idx":27,
"id":"IQ_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x0000060C"
},
{
"idx":28,
"id":"ISD_STATE",
"value":"0x00000005",
"addr":"0x000006B0"
},
{
"idx":29,
"id":"ISD_SPEED",
"value":"0x0000006C",
"addr":"0x000006BA"
},
{
"idx":30,
"id":"IPD_STATE",
"value":"0x00000000",
"addr":"0x000006E4"
},
{
"idx":31,
"id":"IPD_ANGLE",
"value":"0x00000000",
"addr":"0x0000071A"
},
{
"idx":32,
"id":"ED",
"value":"0x00000000",
"addr":"0x0000075C"
},
{
"idx":33,
"id":"EQ",
"value":"0x00000000",
"addr":"0x0000075E"
},
{
"idx":34,
"id":"SPEED_FDBK",
"value":"0x00000000",
"addr":"0x0000076E"
},
{
"idx":35,
"id":"THETA_EST",
"value":"0x00000000",
"addr":"0x00000774"
}
]
]
}

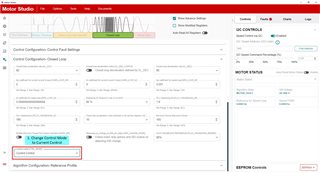





 kp=0.6,ki=20,Noticeable large and small waves,Power consumption is also higher.
kp=0.6,ki=20,Noticeable large and small waves,Power consumption is also higher.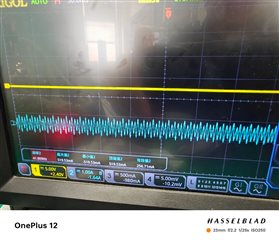 kp=0.6,ki=1500.The large and small waves disappear and the power consumption decreases.
kp=0.6,ki=1500.The large and small waves disappear and the power consumption decreases.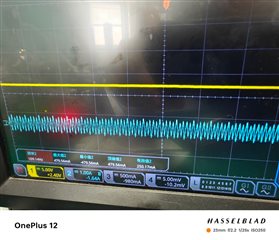 kp=0,ki=0,The effect is pretty much the same.
kp=0,ki=0,The effect is pretty much the same.
 Ok, I have one more question.
Ok, I have one more question.

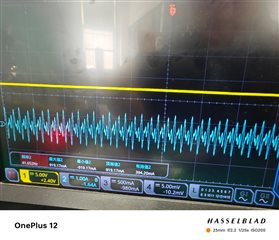
 This is the waveform I adjusted. You can see a lot of spikes and the speed of the speed increase is also slow.
This is the waveform I adjusted. You can see a lot of spikes and the speed of the speed increase is also slow. The waveform is also not very sinusoidal。
The waveform is also not very sinusoidal。 The waveform is even more strange when accelerating。
The waveform is even more strange when accelerating。 It's something else, and the acceleration is very fast and stable
It's something else, and the acceleration is very fast and stable