


Part Number: MCF8329A
Hi,
Recently we have got the MCF8329A1LQRRYRQ1 Dev board for our upcomming project, Details below.
Application : Fan drive
Rated voltage : 14V (Min 8V, Max 16V)
Rated Current : 8A (Max 11A)
Rated speed : 6050 ± 450 RPM
Rotor poles : 8
Resistance : 120 mOhm
Inductance : 20 mhenry
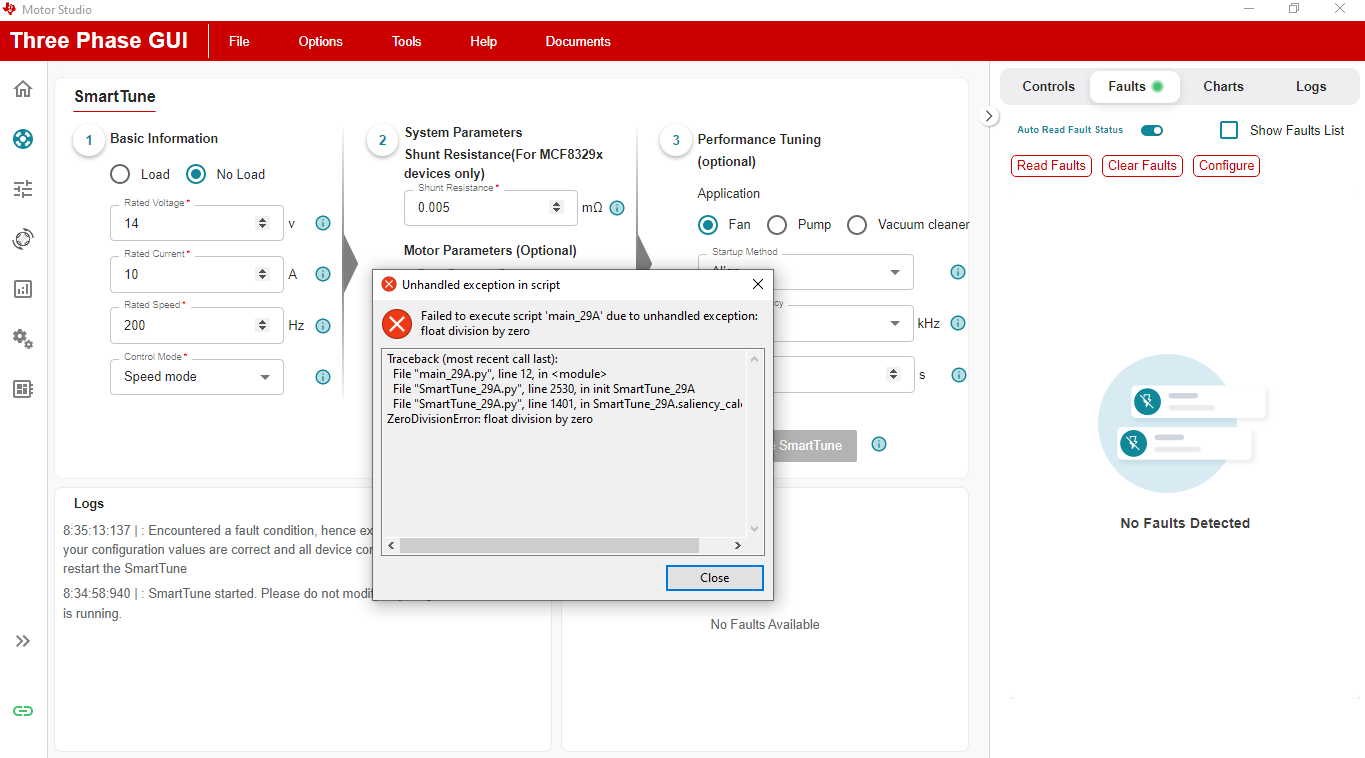
I have connected the Dev board with the motor studio GUI and the GUI detects the board and the hardware set-up is done according to the recommendation. When i try to run the motor using smart tune option it shows a error as zeroDivision error and upon study found that the motor parameter is low for smart tune option so tried to run the motor using manual configuration using potentiometer and the motor is spinning but i am not sure what the motor max current is set and where to find the configuration. I have attached the json file FYR. In my final output i want to run the motor based on the PWM input. Currently i want to configure to run the motor at rated speed with rated current when i try to run the motor using potentiometer it run above 11.5 A and shows current_loop_Saturation fault. i want to understand the configuration so that i could work on further tuning.

{
"signature":"oneui-register-data",
"data":[
[
{
"idx":0,
"id":"ISD_CONFIG",
"value":"0x7422D4A1",
"addr":"0x00000080"
},
{
"idx":1,
"id":"REV_DRIVE_CONFIG",
"value":"0x48300000",
"addr":"0x00000082"
},
{
"idx":2,
"id":"MOTOR_STARTUP1",
"value":"0x08649410",
"addr":"0x00000084"
},
{
"idx":3,
"id":"MOTOR_STARTUP2",
"value":"0x2C81C806",
"addr":"0x00000086"
},
{
"idx":4,
"id":"CLOSED_LOOP1",
"value":"0x1C5B84B8",
"addr":"0x00000088"
},
{
"idx":5,
"id":"CLOSED_LOOP2",
"value":"0x00003B0F",
"addr":"0x0000008A"
},
{
"idx":6,
"id":"CLOSED_LOOP3",
"value":"0x1BEC982B",
"addr":"0x0000008C"
},
{
"idx":7,
"id":"CLOSED_LOOP4",
"value":"0x7ACA1770",
"addr":"0x0000008E"
},
{
"idx":8,
"id":"REF_PROFILES1",
"value":"0x00000000",
"addr":"0x00000094"
},
{
"idx":9,
"id":"REF_PROFILES2",
"value":"0x00000000",
"addr":"0x00000096"
},
{
"idx":10,
"id":"REF_PROFILES3",
"value":"0x80000004",
"addr":"0x00000098"
},
{
"idx":11,
"id":"REF_PROFILES4",
"value":"0x00000000",
"addr":"0x0000009A"
},
{
"idx":12,
"id":"REF_PROFILES5",
"value":"0x00000000",
"addr":"0x0000009C"
},
{
"idx":13,
"id":"REF_PROFILES6",
"value":"0x00000000",
"addr":"0x0000009E"
}
],
[
{
"idx":0,
"id":"FAULT_CONFIG1",
"value":"0xBDD02587",
"addr":"0x00000090"
},
{
"idx":1,
"id":"FAULT_CONFIG2",
"value":"0x71C04888",
"addr":"0x00000092"
}
],
[
{
"idx":0,
"id":"INT_ALGO_1",
"value":"0x09466A3D",
"addr":"0x000000A0"
},
{
"idx":1,
"id":"INT_ALGO_2",
"value":"0x42140261",
"addr":"0x000000A2"
}
],
[
{
"idx":0,
"id":"PIN_CONFIG",
"value":"0xD80C8248",
"addr":"0x000000A4"
},
{
"idx":1,
"id":"DEVICE_CONFIG1",
"value":"0x80100000",
"addr":"0x000000A6"
},
{
"idx":2,
"id":"DEVICE_CONFIG2",
"value":"0x03E8D00C",
"addr":"0x000000A8"
},
{
"idx":3,
"id":"PERI_CONFIG1",
"value":"0x0698C5C0",
"addr":"0x000000AA"
},
{
"idx":4,
"id":"GD_CONFIG1",
"value":"0x00008078",
"addr":"0x000000AC"
},
{
"idx":5,
"id":"GD_CONFIG2",
"value":"0x80000668",
"addr":"0x000000AE"
}
],
[
{
"idx":0,
"id":"GATE_DRIVER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E0"
},
{
"idx":1,
"id":"CONTROLLER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E2"
}
],
[
{
"idx":0,
"id":"ALGO_STATUS",
"value":"0x2BFD0004",
"addr":"0x000000E4"
},
{
"idx":1,
"id":"MTR_PARAMS",
"value":"0x00000000",
"addr":"0x000000E6"
},
{
"idx":2,
"id":"ALGO_STATUS_MPET",
"value":"0x0A000000",
"addr":"0x000000E8"
}
],
[
{
"idx":0,
"id":"ALGO_CTRL1",
"value":"0xAA500000",
"addr":"0x000000EA"
}
],
[
{
"idx":0,
"id":"ALGO_DEBUG1",
"value":"0x00000000",
"addr":"0x000000EC"
},
{
"idx":1,
"id":"ALGO_DEBUG2",
"value":"0x00000000",
"addr":"0x000000EE"
},
{
"idx":2,
"id":"CURRENT_PI",
"value":"0x03050364",
"addr":"0x000000F0"
},
{
"idx":3,
"id":"SPEED_PI",
"value":"0x00000000",
"addr":"0x000000F2"
},
{
"idx":4,
"id":"DAC_1",
"value":"0x00000000",
"addr":"0x000000F4"
}
],
[
{
"idx":0,
"id":"ALGORITHM_STATE",
"value":"0x00000000",
"addr":"0x00000196"
},
{
"idx":1,
"id":"FG_SPEED_FDBK",
"value":"0x00232A32",
"addr":"0x0000019C"
},
{
"idx":2,
"id":"BUS_CURRENT",
"value":"0x00000000",
"addr":"0x0000040E"
},
{
"idx":3,
"id":"PHASE_CURRENT_A",
"value":"0xFD880000",
"addr":"0x0000043C"
},
{
"idx":4,
"id":"PHASE_CURRENT_B",
"value":"0x00180000",
"addr":"0x0000043E"
},
{
"idx":5,
"id":"PHASE_CURRENT_C",
"value":"0x02600000",
"addr":"0x00000440"
},
{
"idx":6,
"id":"CSA_GAIN_FEEDBACK",
"value":"0x00000003",
"addr":"0x00000450"
},
{
"idx":7,
"id":"VOLTAGE_GAIN_FEEDBACK",
"value":"0x00000001",
"addr":"0x00000458"
},
{
"idx":8,
"id":"VM_VOLTAGE",
"value":"0x01DF0000",
"addr":"0x0000045C"
},
{
"idx":9,
"id":"PHASE_VOLTAGE_VA",
"value":"0x02149B09",
"addr":"0x00000460"
},
{
"idx":10,
"id":"PHASE_VOLTAGE_VB",
"value":"0x0213BD55",
"addr":"0x00000462"
},
{
"idx":11,
"id":"PHASE_VOLTAGE_VC",
"value":"0x02149B09",
"addr":"0x00000464"
},
{
"idx":12,
"id":"SIN_COMMUTATION_ANGLE",
"value":"0xFA69B8A0",
"addr":"0x000004AA"
},
{
"idx":13,
"id":"COS_COMMUTATION_ANGLE",
"value":"0x05B60F78",
"addr":"0x000004AC"
},
{
"idx":14,
"id":"IALPHA",
"value":"0x0E200000",
"addr":"0x000004CC"
},
{
"idx":15,
"id":"IBETA",
"value":"0x0B4B5EBE",
"addr":"0x000004CE"
},
{
"idx":16,
"id":"VALPHA",
"value":"0xFFF635F6",
"addr":"0x000004D0"
},
{
"idx":17,
"id":"VBETA",
"value":"0x009DC015",
"addr":"0x000004D2"
},
{
"idx":18,
"id":"ID",
"value":"0x005CFFA7",
"addr":"0x000004DC"
},
{
"idx":19,
"id":"IQ",
"value":"0x120F03C7",
"addr":"0x000004DE"
},
{
"idx":20,
"id":"VD",
"value":"0xFF8A88D1",
"addr":"0x000004E0"
},
{
"idx":21,
"id":"VQ",
"value":"0x006A0F05",
"addr":"0x000004E2"
},
{
"idx":22,
"id":"IQ_REF_ROTOR_ALIGN",
"value":"0x00000000",
"addr":"0x0000051A"
},
{
"idx":23,
"id":"SPEED_REF_OPEN_LOOP",
"value":"0x00000000",
"addr":"0x00000532"
},
{
"idx":24,
"id":"IQ_REF_OPEN_LOOP",
"value":"0x1332EAC0",
"addr":"0x00000542"
},
{
"idx":25,
"id":"SPEED_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x000005D0"
},
{
"idx":26,
"id":"ID_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x0000060A"
},
{
"idx":27,
"id":"IQ_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x0000060C"
},
{
"idx":28,
"id":"ISD_STATE",
"value":"0x00000005",
"addr":"0x000006B0"
},
{
"idx":29,
"id":"ISD_SPEED",
"value":"0x000000A1",
"addr":"0x000006BA"
},
{
"idx":30,
"id":"IPD_STATE",
"value":"0x00000000",
"addr":"0x000006E4"
},
{
"idx":31,
"id":"IPD_ANGLE",
"value":"0x00000000",
"addr":"0x0000071A"
},
{
"idx":32,
"id":"ED",
"value":"0x00000000",
"addr":"0x0000075C"
},
{
"idx":33,
"id":"EQ",
"value":"0x00000000",
"addr":"0x0000075E"
},
{
"idx":34,
"id":"SPEED_FDBK",
"value":"0x00000000",
"addr":"0x0000076E"
},
{
"idx":35,
"id":"THETA_EST",
"value":"0x00000000",
"addr":"0x00000774"
}
]
]
}
