dear ti expert,
i am using drv8837 to drive DC motor, i see that if both inputs to DRV8837 is high, it is brake . i wonder what is the purpose of brake ,just using to control the duty cycle of the driver's output(generally,from the word ,'brake', i think it is a process of stop something)? and in order to stop the motor ,only can use drv8837 in coast mode?
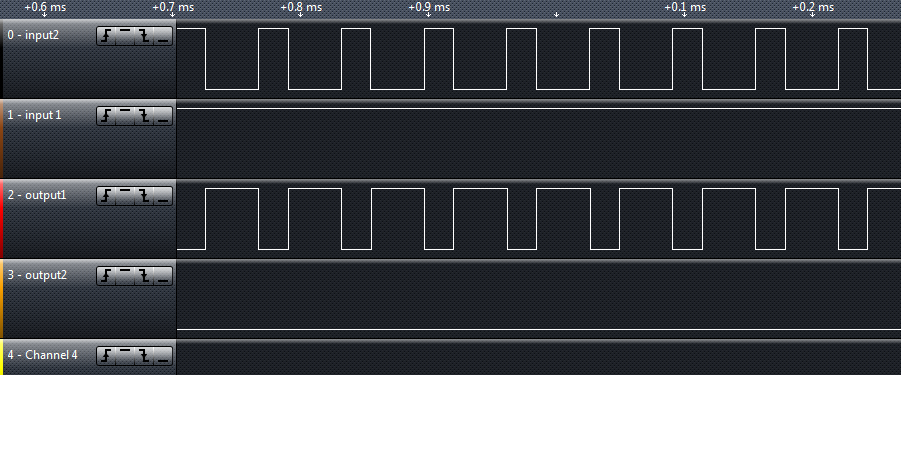
by the way ,can i control drv8837 using an external MCU's complementary pwm function? thanks