Other Parts Discussed in Thread: DRV8876
Hello,
I am attempting to drive a motor using the DRV8872 driver. I am having troubles with driving at low duty cycles. I found on another thread someone was having the same issue, and they switch from the fast decay to slow decay braking, and that solved there issue because the average current was higher due to the slow current decay. So I changed to slow decay braking as well. My problem is that even using slow decay braking, the current is dropping off immediately, rather than a nice decay.
Schematic:
(Note that R14 was decreased to 0.2 ohms allowing 1.75A before the current trip).
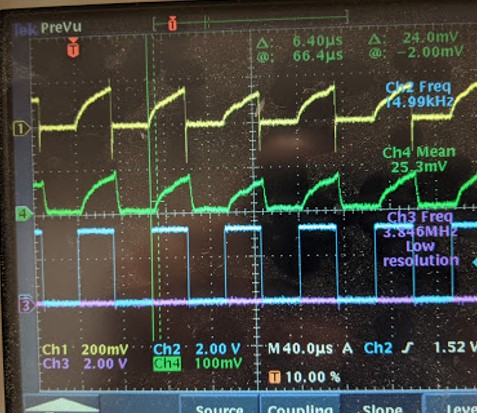
Scope image of fast Decay Mode:
Yellow: ISEN
Blue: IN1
purple: IN2

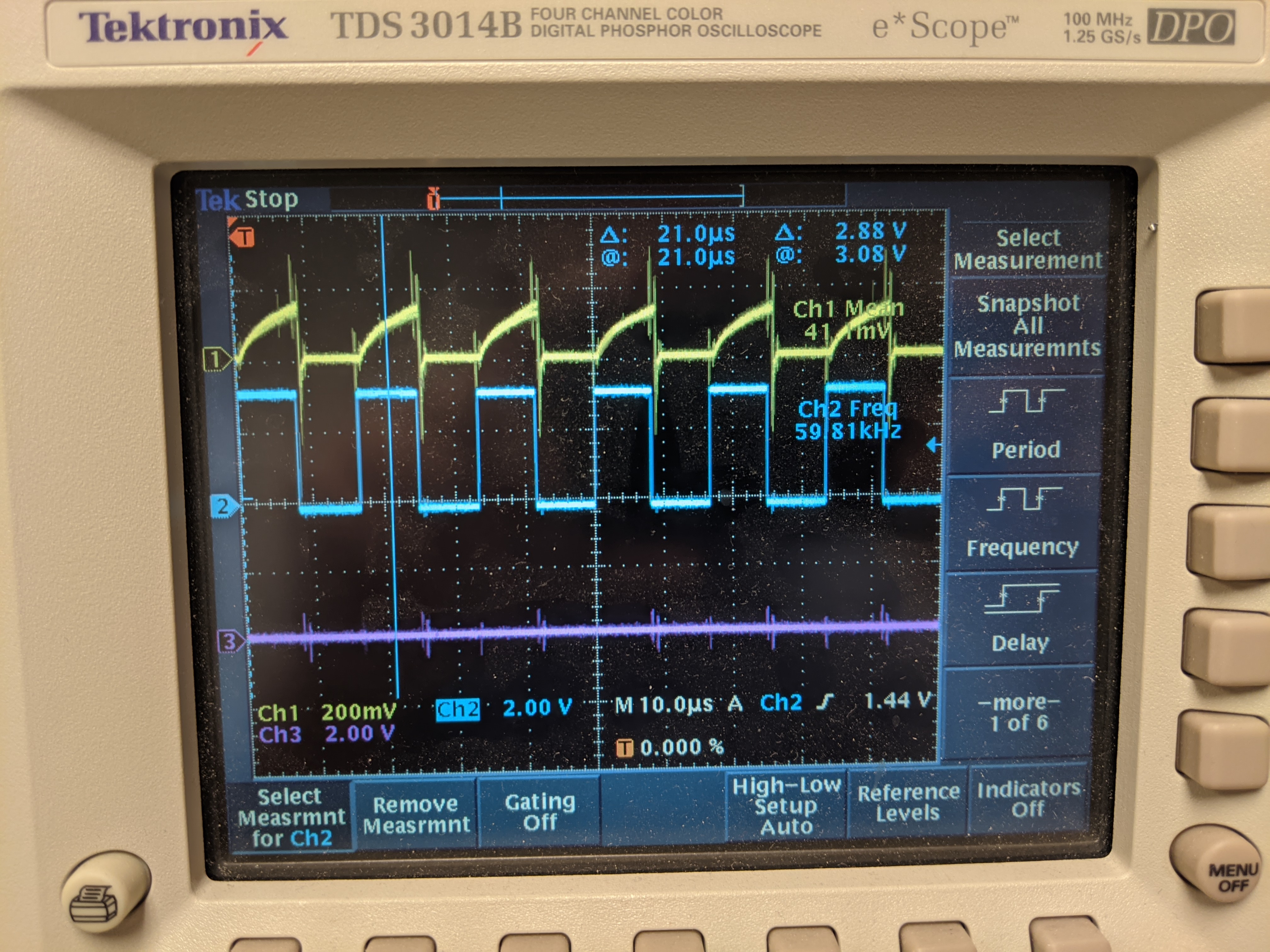
Scope image of slow Decay Mode:
Yellow: ISEN
Blue: IN1
purple: IN2
I would expect the current on the 2nd scope image to have a nice decay to it, rather than a drop right to zero. I would expect it to look like the following spice model output.
Any help is greatly appreciated!
Thanks,
-Aaron