Part Number: UC2625
Other Parts Discussed in Thread: UC1625-SP, DRV8343-Q1, DRV8306
Hello,
I am trying to set up the UC2625 in voltage-mode.
I looked around this forum and found this post https://e2e.ti.com/support/motor-drivers/f/38/p/612755/2382057?tisearch=e2e-sitesearch&keymatch=UC2625#2382057
that linked to this picture (from this application note: https://www.ti.com/lit/an/slua106/slua106.pdf) as a reference for setting the chip for voltage-mode:
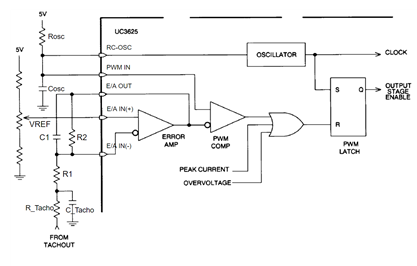
I would like some clarification on how to select values for C1, R1, and R2.
(from some digging around on google, it looks to be something like this but I'm not sure)
By the way, there appears to be an error in the description of the reference design in the UCx625 datasheet. The design claims to be operating in voltage-mode, but the speed does not change as the voltage changes. (Figure 15 in https://www.ti.com/lit/ds/symlink/uc2625.pdf?ts=1606093408447)
Thanks,
Daniel