Other Parts Discussed in Thread: DRV10975, DRV10983
Hi Texas Instruments,
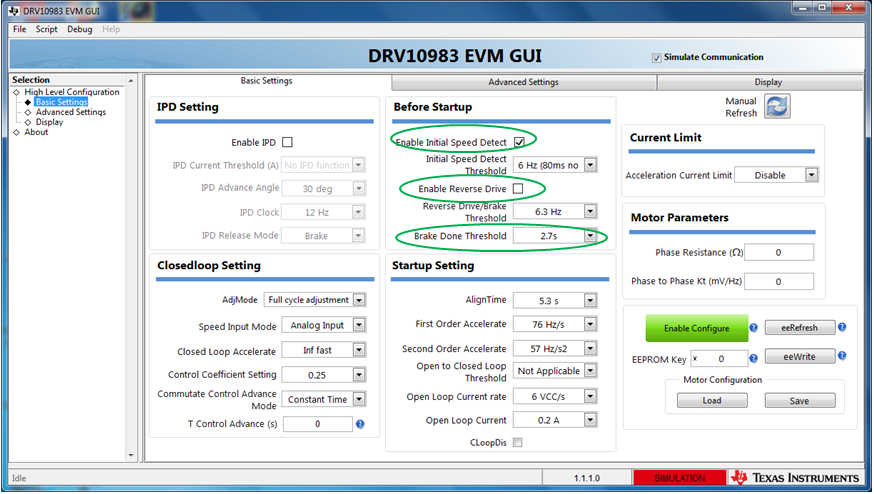
I’m using the DRV10975 in an application where I have programmed the EEPROM with the spin-up profile for my BLDC. Start and stop of the BLDC is done by controlling the supply voltage for the device. The set-up works great except from one operating mode, which is when the chip is trying to start the BLDC when it is freewheeling at very low speed. The motor I ‘am using have an extremely low voltage constant 6.58mV/Hz, I’m assuming the BEMF is too low at these speeds to detect the position of the rotor.
My question is: can the breaking command be used without using reverse drive to assure the motor brake to a stand still for low speed (before the rotor position can be estimated with BEMF)? Or is the solution to increase the AlighnTime to brake the motor to a standstill if the rotor is not detected?
Regards,
Niklas