Other Parts Discussed in Thread: DRV10983, DRV10987
Hello experts,
I am using a drv10983-q1 EWM to evaluate my motor.
motor parameters: 8 poles, 3A RMS max, max speed 45 krpm (normal operation 31 krpm max for long time), R= 0.36 ~ 0.66 Ohm, L = 17 ~ 23 uH.
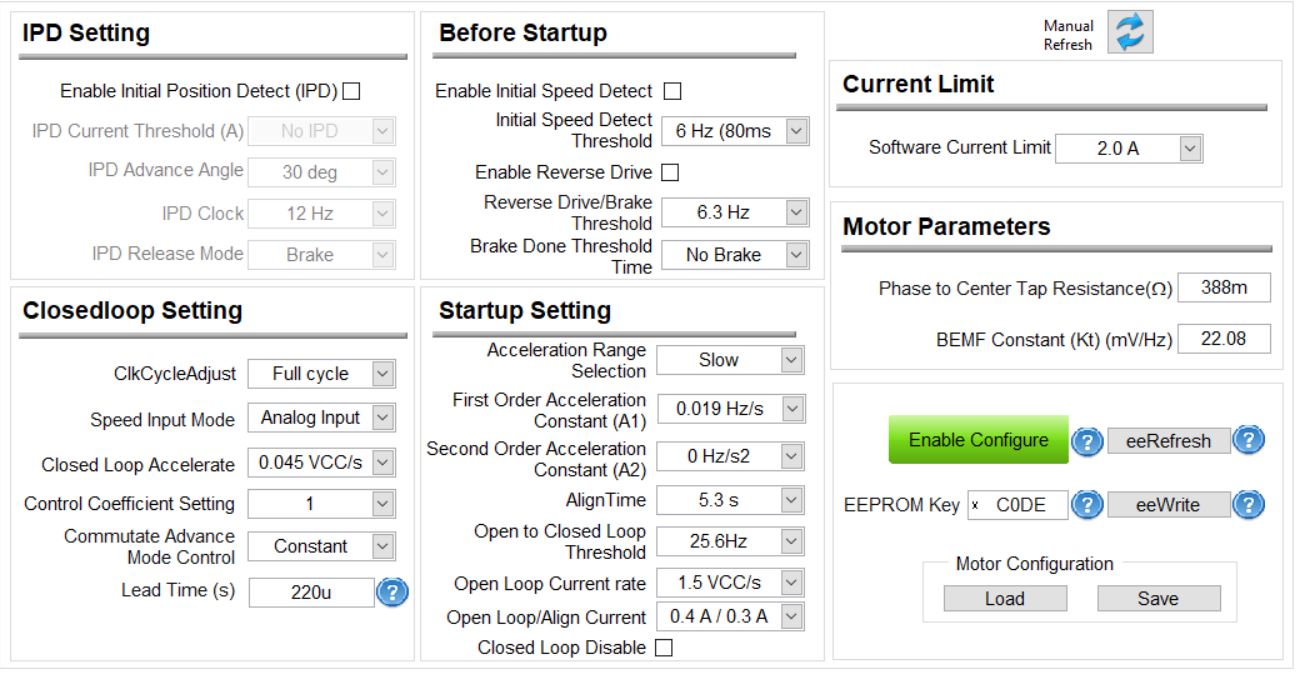
Follow by the turning guide "SLVUAV9–June 2017". I filled out the parameters: Resistance = 0.388 Ohm and Kt = 22.08 mV/Hz. FG cycle = FG/4 (8 poles); slew rate = 120V/us; driver dead time = 440 ns; double the output PWM frequency is checked; open to close loop threadhold = 128 Hz
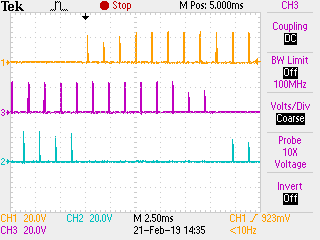
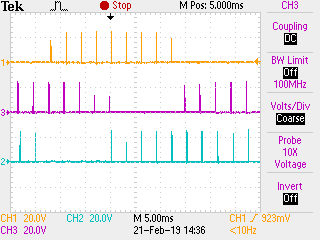
When I set the motor speed to 50Hz, the motor spinning and slowly speed up. But when reach to 35.8 Hz, the motor suddenly stop and start ramp again. Always the same phenomenon.
The lock code show 0x1 : current limit. The over current light is turned on.
When motor stop, the current measured from power supply is 180 mA, so small with the limit current 2A of the Driver.
Please help me,
Best regards