Hello,
I am using the DRV8872 motor driver to drive a brushed DC motor. Although the motor driver is driving the motor, I am observing bad signals on the motor output line and want to know what is causing this in case it is indicative of an underlying issue.
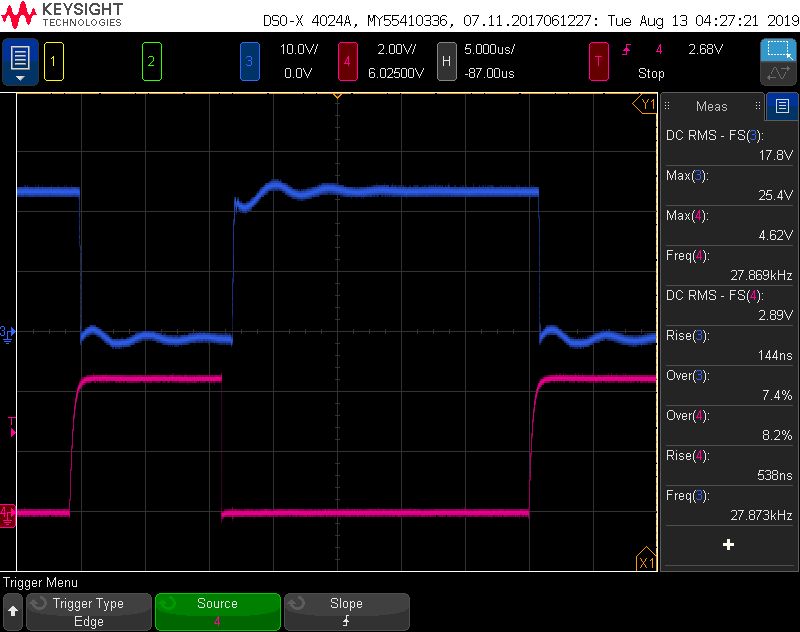
Here is a scope image of what I am seeing. Blue is one of the motor output lines and pink is the corresponding motor input line (It is the same for the other set of input/output). The motor input is being PWM driven at 20kHz frequency and 25% duty cycle.

If you zoom in, you can see the motor output line exhibits many weird behavior on rising and falling edge.

Is there any explanation for what is causing the motor output signal to look like this? Or suggestion for improvements to correct the behavior.
Thank you.