


Hello,
This thread is intended to discuss, seek advice and help on analysis on maximizing the stall torque design for a particular dc motor using DRV8837 motor driver.
I am not quite expert in analog domain and motor control, I have a project for door lock application using TI DRV8837. One of the design parameter that I need clarification is about maximizing the torque for driving mortise lock.
We can isolate the gear ratio and resulting speed after gear reduction and focus on the origin that is the torque on motor.
Here is the graph characteristic for the dc motor: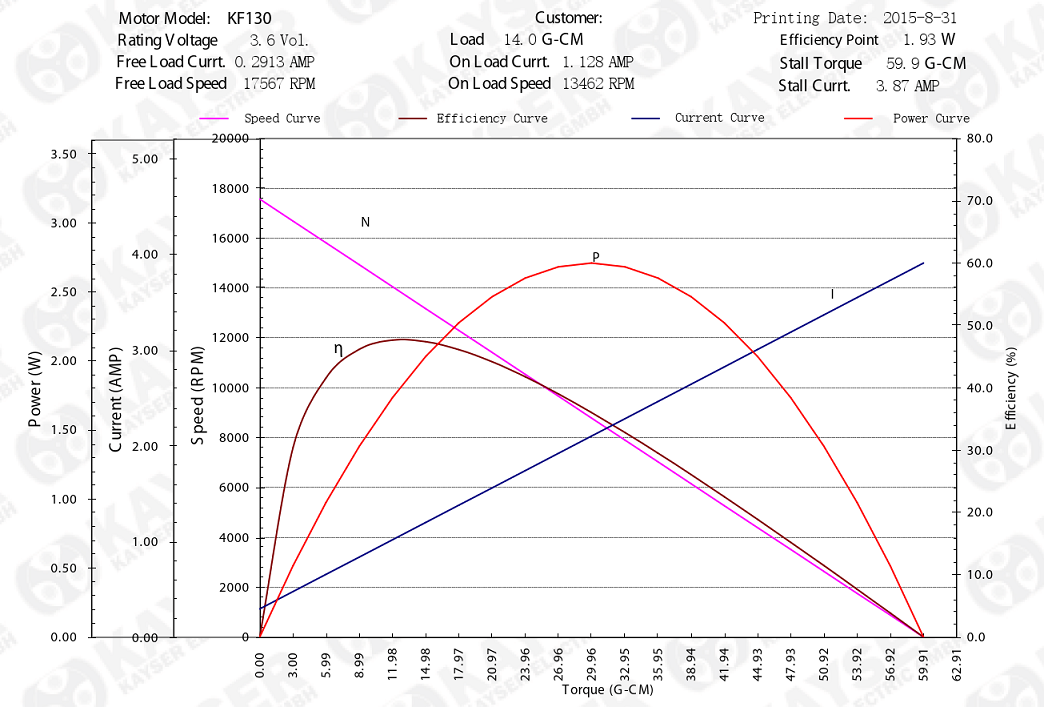
The system works as specified:
- The system is intended for door lock application
- The system uses 4xAA alkaline batteries in series configuration as power source
I've done some test by measuring the current and voltage to the motor and analyze against the characteristic graph:
- I drive the DRV8837 with MSP432 PWM with 100% (full on) on one input and the other input is driven low (pwm idle low)
- The battery voltage is not so fresh, it is around 5.8 V
- Then I hold the motor until it is stop/stall
- I record the current through the motor is around 1.6 ~ 1.7 A
- I record the voltage on the motor and it is drop to around 1.4 V when stall
Here are my analysis:
- Using the characteristic graph for 3.6 V to the motor (no load speed & stall torque), I calculate with two point equation and got the equation:
y = -(175670/599) x + 17567
With y = speed
With x = torque - Since the relationship is linear, the resulting drop voltage to 1.4 V at stall will change the graph charactertistic. To find this changes, I recalculate the graph characteristic for 1.4 V. I get the no load speed point to be:
(1.4 / 3.6) * 17567 = 6831.6 rpm. - Then since the slope on graph characteristic will be the same, the new equation at 1.4 V will be:
y = -(175670/599) x + 6831.6 - The stall torque at 1.4V can be calculated with y = 0. It is 23.29 g-cm.
- As far as I know, the torque constant is not changing so the current-torque relation on its graph is the same even for 1.4 V.
I calculate the equation for current-torque relation and based on my current reading at stall (1.6A ~ 1.7A), that means the torque is 23.57 g-cm at 1.7 A. - That means with DRV8837 powered using batteries, the stall torque can be achieved but due to battery as unideal power source the resulting stall torque is constrained.
For example in this case I get 23.29 g-cm instead of 59.9 g-cm.
Questions:
- Does this analysis is quite correct/legitimate for me to determine max stall torque that I could achieve using DRV8837 with battery as power source?
Any helps or advises are much apperciated. Thank you :)
Regards,
Pranata.

