


Hi Rick,
My DRV8889-Q1 EVM got delivered today, I am making an initial setup to drive my motor. I have some questions:
1. To drive the motor uisng MSP430 onboard, do I have to supply 3.3V to the first pin on J3 header?

2. If I decide to use a external controller (Beagle Bone in my case) what are the steps I need to follow? I found the below text in the user manual for using external micro, but how do I remove the resistors from the PCB?

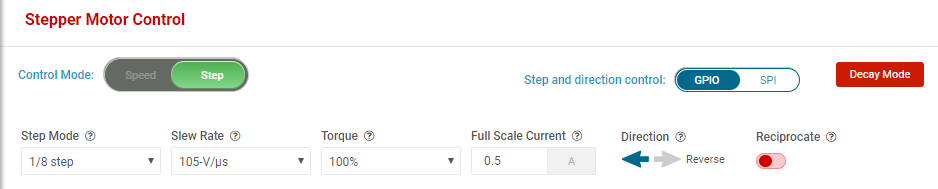
3. For driving the motor in the step mode configuration, what are the absolute necessary parameters I need to configure from the GUI(for just spinning the motor demo)?
4. In the GUI,we have two options for "Step and Direction Control"- GPIO, SPI, which to use when?
I look forward to your response.
Thank you,
Arshiya Tabassum

