


Other Parts Discussed in Thread: MOTORWARE
Hi All,
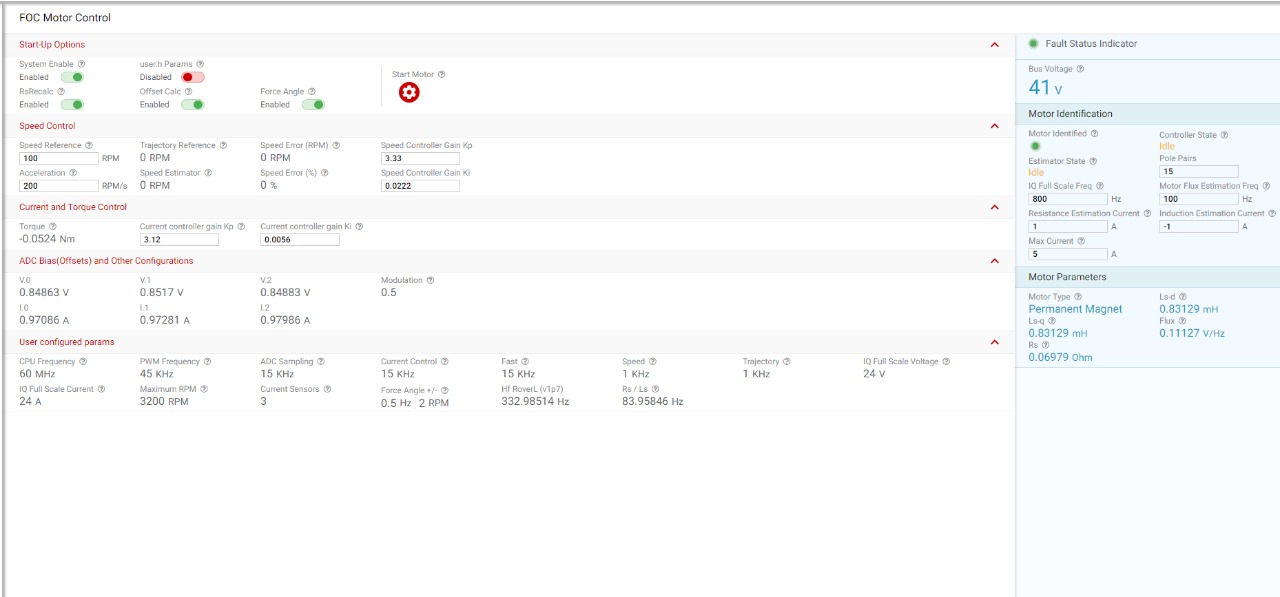
We have a DRV8353RH eval board and a 42V PMSM Motor. We are connecting both and using the DRV8353Rx 1.0.1 GUI utility to identify the motor parameters.
This is what happens:
- We start the motor identification process in FOC Motor Control mode.
- Motor starts spinning and the tool identifies the motor parameters. There is a bit of noise in the motor during EST_State_Ls state
- The Rs value is reasonably consistent but the Ls value varies drastically for each identification
- The TORQUE value is very low and in negative
- The Max RPM detected is high. Generally electric scooter motors rate around 600RPM. But tool says it is 3200RPM
- Tool says motor is identified successfully. Now we try to start the motor and with the speed reference at 100RPM
- There is a lot of noise from the motor and it jerks a bit but doesn't run
- We stop the motor at this point lest it gets damaged.
Can you help understand what we are missing here? PFB the utility screenshot for reference with the motor parameters identified
 About the motor:
About the motor:
- Both the motor and the battery were removed from a Electric scooter. We don't have it's spec.
- DC Voltage 42V [Rating on the battery confirmed by the BUS voltage detected by the DRV8353Rx utility]
- Max Motor current 5A [Based on battery rating]
- Number of poles: 15. [We ran the motor on the scooter and probed a HALL sensor line on an oscilloscope and counted the number of pulses for 1 RPM]
Settings on the Utility:
- We are using the automatic Motor identification mode in the utility by disabling user.h Params and enabling RsRecalc, Offset Calc and Force Angle.
- Pole pairs set to 15
- Motor Flux Estimation Freq set to 100Hz
- Estimation currents set at: 1A & -1A
Any help is much appreciated. Thanks in Advance.
Thanks & Cheers,
TC.
