Two common interfaces used to control brushed DC motors are Phase/Enable (PH/EN) and PWM. Both of these interfaces require 2 signals to be able to fully control brushed DC motors or other types of load connected to the outputs of a motor driver.
Phase/Enable (PH/EN) Interface
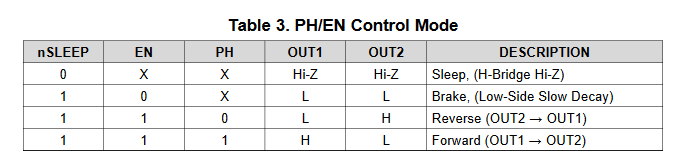
PH/EN control interface use two signals, Phase (PH) and Enable (EN), to control the states of the motor driver outputs. PH/EN allows for the H-bridge of the motor driver to be controlled with a speed and direction type of interface. The PH signal sets the current direction across the outputs of the H-bridge and is usually always set to either logic HIGH or LOW. The EN signal sets the speed of the motor according to duty cycle. The longer the duty cycle, the faster the speed of the motor.
PH/EN can be much easier to implement since it only requires one signal to set the motor speed which can save MCU resources. However, one drawback is that the H-bridge outputs cannot be set to High-Z under this control interface. Another drawback of PH/EN is that the "OFF" time or decay mode is limited to low-side current re-circulation. Read this app-note to learn more about decay modes.
An example of a truth table for PH/EN interface is shown below.
PWM Interface
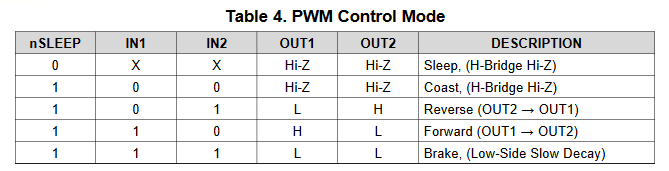
PWM control interface uses two signals, IN1 and IN2, to set the output states of the H-bridge. This interface is controlled by two PWMing signals (IN1 and IN2) with varying duty cycles to set the speed and direction of a motor. Unlike PH/EN, PWM allows for the H-bridge outputs to enter High-Z state without the need to place the driver into sleep mode. PWM interface can set the decay mode to coasting, or asynchronous decay, where the H-bridge FETs are set to High-Z and the current recirculates through the body diodes of the FETs.
An example of a truth table for PWM interface is shown below.