Other Parts Discussed in Thread: TCA9554, TCA9548A,
Hi Team,
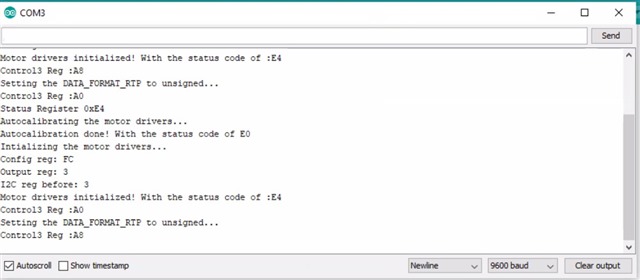
According to the customer, when running the DRV2605L motor drivers in RTP mode, the maximum value they could use is 127 (0x7F). When they changed the sign bit to unsigned so that they have higher integer values in Control3 register (address 0x1D) they couldn`t run the motors. Is there any register they need to configure aside from Control3 register?
Thank you for your support!
Regards,
Danilo