Other Parts Discussed in Thread: TPS62150
Hi,
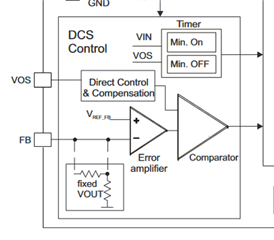
Looking at figure 33,34 and 35 shows a frequency variation that doesn't match with theory ("Understanding frequency variation in the
DCS-Control topology" - by Chris Glaser).
topology" - by Chris Glaser).
Indeed, in DCS control scheme, frequency would rise with load current (as duty cycle would rise with losses and constant Ton, only frequency can rise).
How can you explain this phenomena ?
Regards,
Adrien