Other Parts Discussed in Thread: LM5026, LM5036, LM5033, UCC2897A
Hi,
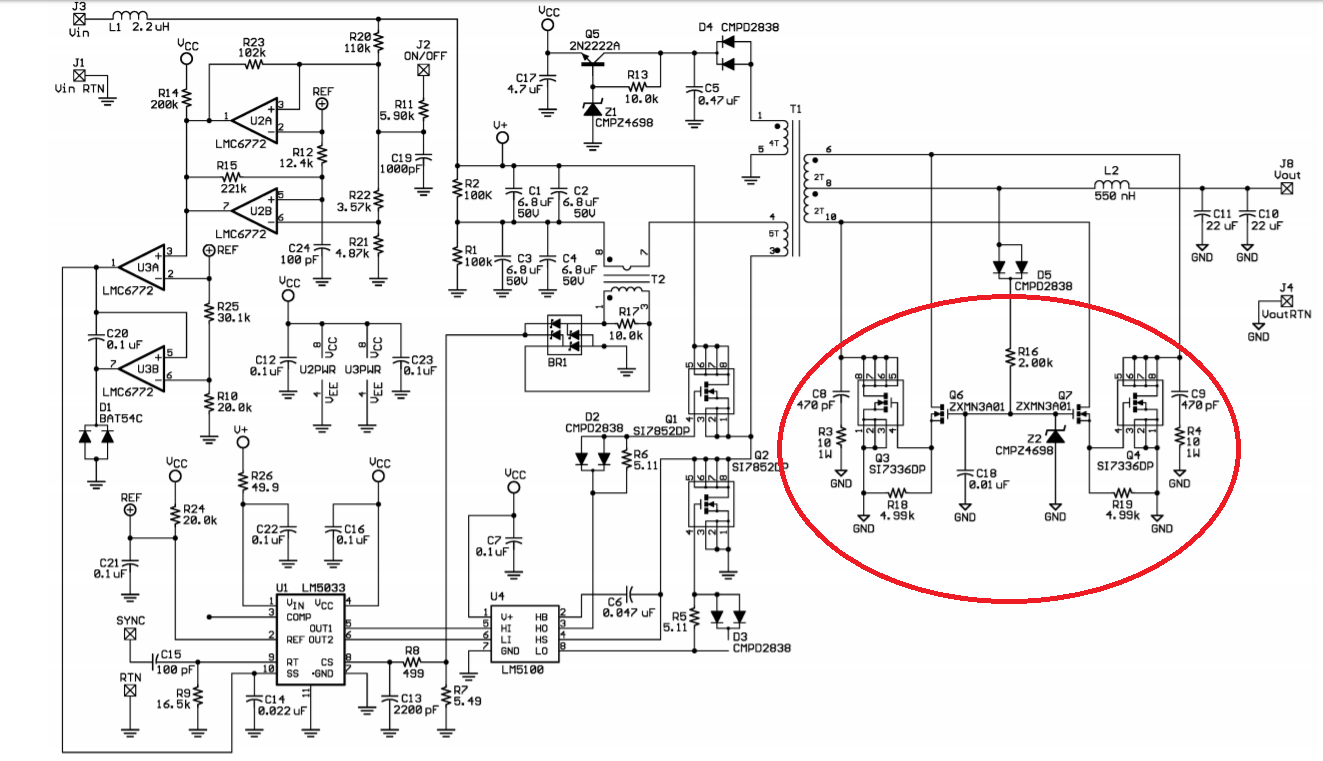
I am planning to design a circuit using LM5041 reference design.
My specification is same as the LM5041 evalkit spec. That is Vin=35V to 80V, Vo=2.5V/50A .
I have some doubt regarding LM5041 Evaluation board synchronous rectification. My doubt is
1. Can i implement a self synchronous rectification circuit in my design by removing T3 and T4 driving transformer and its driver mosfets?. I am planning to implement a self synchronous circuit as in LM5026 evaluation board. Will this solution work out?
2. Up to what output current and voltage we can use self synchronous circuit?. What is its design criteria ? or is it related to topology ?. Is there any efficiency problem?
Regards
Aneesh