Hi,
For the below-attached post, Sorry, I was unable to reply the my post, so I have created a new thread to reply
[Monish]:
We are doing a continuous environmental test for all the interfaces available in our custom board. Each interface tests are sequential and each iteration will take around 1.5 mins to complete testing all the interfaces in the custom board. And we are using two CAN interfaces in our custom board and we do loopback both the ports for environmental testing. And we can transmit and receive messages on both ports. We set the bitrate and enable the CAN ports by using these commands.
#ip link set can0 type can bitrate 1000000 # set bit rate
#ip link set can0 up # set can0 up
#ip link set can1 type can bitrate 1000000 # set bit rate
#ip link set can1 up # set can1 up
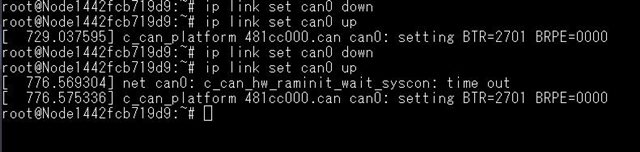
When we use the above command, we are getting the timeout message like below for each iteration (Log from Syslog). Why we are getting a timeout message? Whether the frequent timeout error will cause any problem if the system runs for more than 24 hours.
2021-06-04T14:07:42.535150+00:00 am437x-custom kernel: [10615.455475] net can0: c_can_hw_raminit_wait_syscon: time out
2021-06-04T14:07:42.535237+00:00 am437x-custom kernel: [10615.461843] c_can_platform 481cc000.can can0: setting BTR=2701 BRPE=0000
2021-06-04T14:07:42.584839+00:00 am437x-custom kernel: [10615.512659] net can1: c_can_hw_raminit_wait_syscon: time out
2021-06-04T14:07:42.595194+00:00 am437x-custom kernel: [10615.519524] c_can_platform 481d0000.can can1: setting BTR=2701 BRPE=0000
2021-06-04T14:07:52.615153+00:00 am437x-custom kernel: [10625.533893] c_can_platform 481cc000.can can0: setting BTR=2701 BRPE=0000
2021-06-04T14:07:52.665631+00:00 am437x-custom kernel: [10625.584586] net can1: c_can_hw_raminit_wait_syscon: time out
2021-06-04T14:07:52.665726+00:00 am437x-custom kernel: [10625.590801] c_can_platform 481d0000.can can1: setting BTR=2701 BRPE=0000
2021-06-04T14:08:01.450176+00:00 am437x-custom crond[1000]: (root) WRONG FILE OWNER (/var/spool/cron/root)
2021-06-04T14:09:01.451354+00:00 am437x-custom crond[1000]: (root) WRONG FILE OWNER (/var/spool/cron/root)
2021-06-04T14:09:07.065079+00:00 am437x-custom kernel: [10699.987593] c_can_platform 481cc000.can can0: setting BTR=2701 BRPE=0000
2021-06-04T14:09:07.115002+00:00 am437x-custom kernel: [10700.038186] net can1: c_can_hw_raminit_wait_syscon: time out
2021-06-04T14:09:07.115089+00:00 am437x-custom kernel: [10700.044657] c_can_platform 481d0000.can can1: setting BTR=2701 BRPE=0000
2021-06-04T14:09:17.144960+00:00 am437x-custom kernel: [10710.067504] net can0: c_can_hw_raminit_wait_syscon: time out
2021-06-04T14:09:17.145153+00:00 am437x-custom kernel: [10710.073994] c_can_platform 481cc000.can can0: setting BTR=2701 BRPE=0000
2021-06-04T14:09:17.205233+00:00 am437x-custom kernel: [10710.122861] c_can_platform 481d0000.can can1: setting BTR=2701 BRPE=0000
Which version of the kernel are you using?
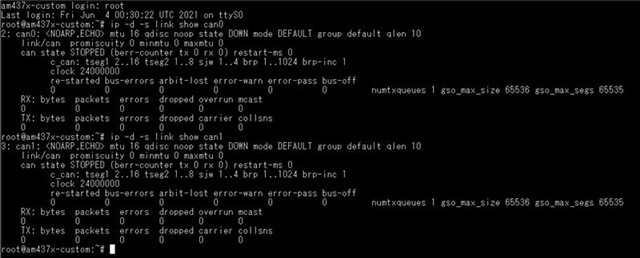
Could you please post the output for each interface?
ip -d -s link show <can interface>
Regards,
Monish P