Hi,
I was trying to calculate the execution time of a task running inside M4 with bare-metal code(No- OS), how I can do that.
I tried with example provided in C:\ti\pdk_am57xx_1_0_15\packages\ti\csl\example\timer\timer_app\main_m4.c by using timers, but I am getting huge time period values. And I am getting 120 clock ticks for 2 successive TIMERCounterGet calls, why this much of huge values? Is any thing I am doing wrong?
SYS_CLK1 is the clock signal for the timer and in IDK board it's 20 MHz.
Below are the steps I have followed:
1. Started a timer4 with 60 sec timeout in interrupt mode
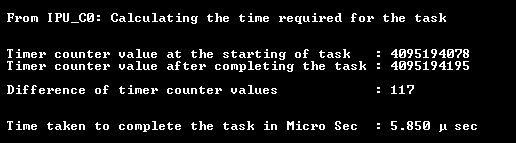
2. Reading the TIMERCounterGet before and after the task execution, and calculating the number of clock ticks for executing the task
3. Calculating the time period from the difference in clock ticks,
time period = (clock ticks * 0.05 Micro sec)
As frequency is 20 Mhz, one clock tick will be 0.05 Micro Sec.
/*
* Copyright (C) 2013-2017 Texas Instruments Incorporated - http://www.ti.com/
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/**
* \file main_m4.c
*
* \brief This file demonstrates TIMER dal.
*
**/
/* ========================================================================== */
/* Include Files */
/* ========================================================================== */
#include <ti/csl/example/utils/uart_console/inc/uartConfig.h>
#include "stdint.h"
#include "stdio.h"
#include <ti/csl/soc.h>
#include <ti/csl/csl_timer.h>
#include "sample.h"
#include <ti/csl/csl_types.h>
#include <ti/csl/arch/csl_arch.h>
#if defined (SOC_AM574x) || defined (SOC_AM572x) || defined (SOC_AM571x)
#include <ti/board/board.h>
#endif
/* ========================================================================== */
/* Macros & Typedefs */
/* ========================================================================== */
#if defined (SOC_AM574x) || defined (SOC_AM572x) || defined (SOC_AM571x)
uint32_t INP_CLK_FREQ = 20000000U;
uint32_t TIMER_INITIAL_COUNT = 0U;
uint32_t TIMER_RLD_COUNT = 0U;
void Timer_val(uint32_t inp_clk, uint32_t delay, uint32_t prescl_val);
#else
#define TIMER_INITIAL_COUNT (0xFFF00000U)
#define TIMER_RLD_COUNT (0xFFF00000U)
#endif
#if defined (SOC_AM574x) || defined (SOC_AM572x) || defined (SOC_AM571x)
uint32_t irq_count = CSL_IPU_IRQ_XBAR_COUNT;
uint32_t uartBaseAddr = CSL_MPU_UART3_REGS;
#endif
#if defined (SOC_TDA2XX) || defined (SOC_TDA2PX) || defined (SOC_TDA2EX) || defined (SOC_DRA72x) || defined (SOC_DRA75x)
uint32_t irq_count = CSL_IPU1_IRQ_XBAR_COUNT;
uint32_t uartBaseAddr = SOC_UART1_BASE;
#endif
#if defined (SOC_TDA3XX) || defined (SOC_DRA78x)
uint32_t irq_count = CSL_IPU1_IRQ_XBAR_COUNT;
uint32_t uartBaseAddr = SOC_UART3_BASE;
#endif
/* ========================================================================== */
/* Internal Varialbes Definitions */
/* ========================================================================== */
static volatile uint32_t gCntValue = 10;
static volatile uint32_t gIsrSemaphore = 0;
static volatile uint32_t gXbarInst = 1;
static volatile uint32_t gNumSuccess = 0;
/* ========================================================================== */
/* Internal Function Declarations */
/* ========================================================================== */
static void TimerPRCMConfigure(void);
static void TimerIntcInit(void);
static void TimerIntcDeInit(void);
static void TimerSetUp(void);
static void TimerIsr(void *handle);
static void TimerRun(void);
/* ========================================================================== */
/* Function Definitions */
/* ========================================================================== */
void padConfig_prcmEnable()
{
#if defined (SOC_AM574x) || defined (SOC_AM572x) || defined (SOC_AM571x)
/*Pad configurations */
Board_initCfg boardCfg;
boardCfg = BOARD_INIT_UNLOCK_MMR | BOARD_INIT_UART_STDIO |
BOARD_INIT_MODULE_CLOCK | BOARD_INIT_PINMUX_CONFIG;
Board_init(boardCfg);
#endif
#if defined (SOC_TDA2XX) || defined (SOC_TDA2PX) || defined (SOC_TDA2EX) || defined (SOC_DRA72x) || defined (SOC_DRA75x)
/*Pad configurations */
HW_WR_REG32(SOC_CORE_PAD_IO_REGISTERS_BASE+CTRL_CORE_PAD_UART1_RXD,0x00040000);
HW_WR_REG32(SOC_CORE_PAD_IO_REGISTERS_BASE+CTRL_CORE_PAD_UART1_TXD,0x00000000);
/* Initialize the UART Instance */
UARTConfigInit(uartBaseAddr, BAUD_RATE_115200, UART_WORD_LENGTH_8, UART_STOP_BIT_1, UART_NO_PARITY,
UART_16x_MODE);
#endif
#if defined (SOC_TDA3XX) || defined (SOC_DRA78x)
/*Pad configurations */
HW_WR_REG32(SOC_CORE_PAD_IO_REGISTERS_BASE+CTRL_CORE_PAD_IO_SPI1_SCLK,0x00040001);
HW_WR_REG32(SOC_CORE_PAD_IO_REGISTERS_BASE+CTRL_CORE_PAD_IO_SPI1_CS0,0x00000001);
/* Initialize the UART Instance */
UARTConfigInit(uartBaseAddr, BAUD_RATE_115200, UART_WORD_LENGTH_8, UART_STOP_BIT_1, UART_NO_PARITY,
UART_16x_MODE);
#endif
}
int main(void)
{
/* Do Pad Config for UART */
padConfig_prcmEnable();
/*Set PRCM for Timer4 */
/*This is done in SBL, adding here to make the app standalone */
TimerPRCMConfigure();
#if defined (SOC_AM574x) || defined (SOC_AM572x) || defined (SOC_AM571x)
/*Set the timer reload count value */
Timer_val(INP_CLK_FREQ, 50000U,1U);
#endif
UARTConfigPuts(uartBaseAddr,"\nTimer Application Running", -1);
/* Run the Timer irq_count times,
* increment gXbarInst in each iteration */
for (gXbarInst = 1; gXbarInst <= irq_count; gXbarInst++)
{
TimerRun();
}
if (gNumSuccess == irq_count)
{
UARTConfigPuts(uartBaseAddr,"\nAll Xbar instances for M4 are verified successfully", -1);
}
return 0;
}
static void TimerRun(void)
{
/* Register Timer4 interrupts on to INTC */
TimerIntcInit();
/* Perform the necessary configurations for Timer4 */
TimerSetUp();
/* Enable the Timer4 interrupts */
TIMERIntEnable(SOC_TIMER4_BASE, TIMER_INT_OVF_EN_FLAG);
/* Start the Timer */
TIMEREnable(SOC_TIMER4_BASE);
UARTConfigPuts(uartBaseAddr,"\ncntValue:", -1);
while (gCntValue)
{
if (gIsrSemaphore)
{
gIsrSemaphore--;
UARTConfigPuts(uartBaseAddr," ", -1);
UARTConfigPutNum(uartBaseAddr,(int32_t)gCntValue);
}
}
/* Stop the Timer */
TIMERDisable(SOC_TIMER4_BASE);
if (gCntValue == 0)
{
UARTConfigPuts(uartBaseAddr,"\n|RESULT|SUCCESS|", -1);
}
else
{
UARTConfigPuts(uartBaseAddr,"\n|RESULT|FAIL|", -1);
}
/* Unregister Timer4 interrupts */
TimerIntcDeInit();
}
/*
** Do the necessary Timer configurations on to INTC.
*/
static void TimerIntcInit(void)
{
CSL_xbarIrqConfigure(CSL_XBAR_IRQ_CPU_ID_IPU1,gXbarInst,CSL_XBAR_TIMER4_IRQ);
UARTConfigPuts(uartBaseAddr,"\nXBar is sucessfully connected to inst:", -1);
UARTConfigPutNum(uartBaseAddr,(int32_t)gXbarInst);
/* Initialize the interrupt control */
Intc_Init();
/* Enable the interrupt */
Intc_IntEnable(0);
/* Registering TimerIsr */
Intc_IntRegister(intrM4[gXbarInst - 1], (IntrFuncPtr) TimerIsr, NULL);
/* Set the priority */
Intc_IntPrioritySet(intrM4[gXbarInst - 1], 1, 0);
/* Enable the system interrupt */
Intc_SystemEnable(intrM4[gXbarInst - 1]);
}
/*
** Disable the interrupt configurations on INTC.
*/
static void TimerIntcDeInit(void)
{
/* Restore the initial state of gCntValue */
gCntValue = 10;
/* Disconnect the XBar */
CSL_xbarIrqConfigure(CSL_XBAR_IRQ_CPU_ID_IPU1,gXbarInst,CSL_XBAR_IRQ_MIN);
/* Disable the timer interrupt */
Intc_SystemDisable(intrM4[gXbarInst - 1]);
/* Unregister the interrupt */
Intc_IntUnregister(intrM4[gXbarInst - 1]);
}
/*
** Setup the timer for one-shot and compare mode.
*/
static void TimerSetUp(void)
{
/*Reset the timer module */
TIMERReset(SOC_TIMER4_BASE);
/* Enable free run in emulation mode */
TIMEREmuModeConfigure(SOC_TIMER4_BASE, TIMER_FREE);
/* Load the counter with the initial count value */
TIMERCounterSet(SOC_TIMER4_BASE, TIMER_INITIAL_COUNT);
/* Load the load register with the reload count value */
TIMERReloadSet(SOC_TIMER4_BASE, TIMER_RLD_COUNT);
/* Configure the Timer for Auto-reload and compare mode */
TIMERModeConfigure(SOC_TIMER4_BASE, TIMER_AUTORLD_NOCMP_ENABLE);
/* Configure the posted mode of TIMER */
TIMERPostedModeConfig(SOC_TIMER4_BASE, TIMER_NONPOSTED);
/* Configure the read mode of TIMER */
TIMERReadModeConfig(SOC_TIMER4_BASE, TIMER_READ_MODE_NONPOSTED);
}
/*
** Timer interrupt service routine. This will send a character to serial
** console.
*/
static void TimerIsr(void *handle)
{
/* Disable the Timer interrupts */
TIMERIntDisable(SOC_TIMER4_BASE, TIMER_INT_OVF_EN_FLAG);
/* Clear the status of the interrupt flags */
TIMERIntStatusClear(SOC_TIMER4_BASE, TIMER_INT_OVF_IT_FLAG);
gIsrSemaphore++;
gCntValue--;
if (gCntValue == 0)
{
UARTConfigPuts(uartBaseAddr," ", -1);
UARTConfigPutNum(uartBaseAddr,(int32_t) (gCntValue));
gIsrSemaphore = 0;
gNumSuccess++;
}
/* Enable the Timer interrupts */
TIMERIntEnable(SOC_TIMER4_BASE, TIMER_INT_OVF_EN_FLAG);
}
/*
** Timer4 PRCM configuration. This will explicitly enable the Timer4 module.
*/
static void TimerPRCMConfigure(void)
{
HW_WR_REG32(SOC_L4PER_CM_CORE_BASE + CM_L4PER_TIMER4_CLKCTRL, 0x2);
while ((HW_RD_REG32(SOC_L4PER_CM_CORE_BASE +
CM_L4PER_TIMER4_CLKCTRL) & (0x00030000)) != 0x0) ;
}
/*
** This function is used to find the timer count value
** required for the provided delay
** inp_clk is the input clock source of the timer.
** time unit is always micro seconds.
** prescl_val defines the timer prescale value.
*/
#if defined (SOC_AM574x) || defined (SOC_AM572x) || defined (SOC_AM571x)
void Timer_val(uint32_t inp_clk, uint32_t delay, uint32_t prescl_val)
{
uint32_t divisor = 1000000U, count = 0U;
divisor = divisor * prescl_val;
count = (inp_clk / divisor) * delay;
if(count <= 0xffffffffU)
{
TIMER_INITIAL_COUNT = 0xffffffff - count;
TIMER_RLD_COUNT = 0xffffffff - count;
}
else
{
TIMER_INITIAL_COUNT = 0U;
TIMER_RLD_COUNT = 0U;
}
}
#endif
/********************************* End of file ******************************/
And one more doubt, as M4 is not supporting Hardware FPU's what is the added delay if I use software FPU library in the application execution time.
Regards,
Naveen.