


Other Parts Discussed in Thread: DRV5012
Gentlemen,
I am building a portable rotary encoder that functions as a user interface. For that I have put on 2 DRV5032FD (sample at 20Hz). I use them to wake up my uC through interrupts.
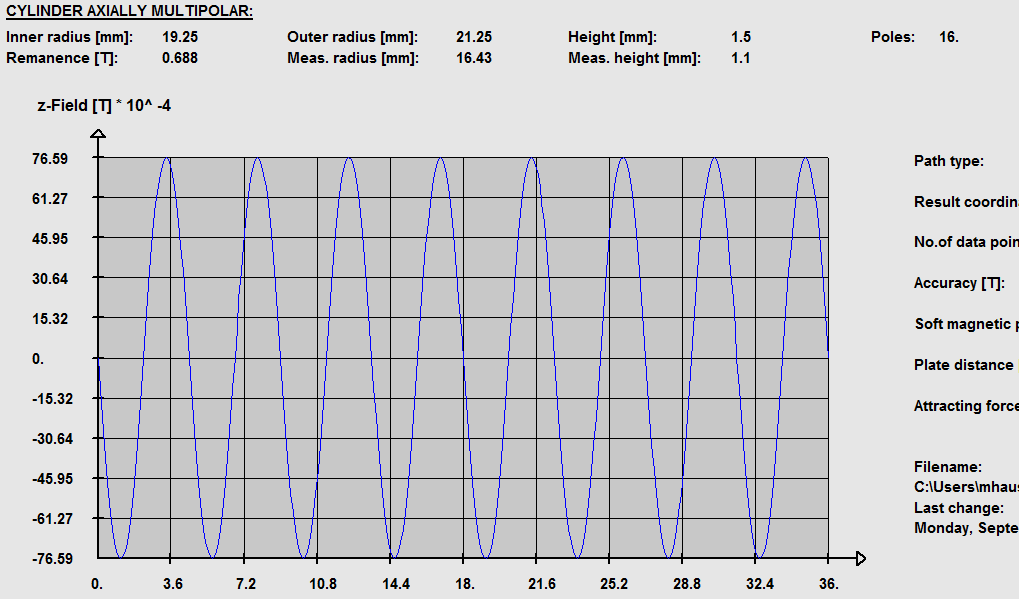
Simulation of my magnet ring in the given mechanical design:
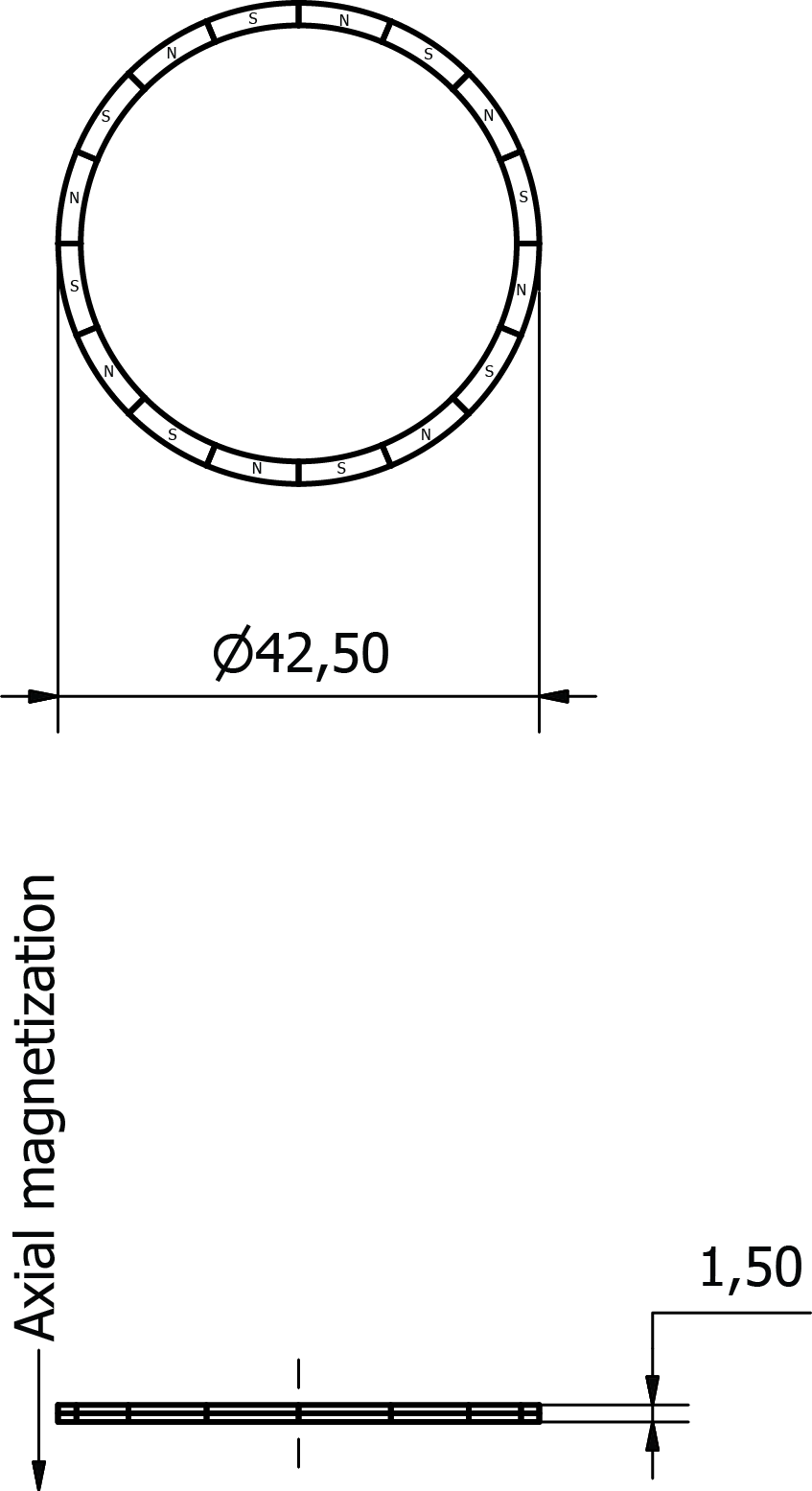
The physical dimensions and outlay of the magnet ring:
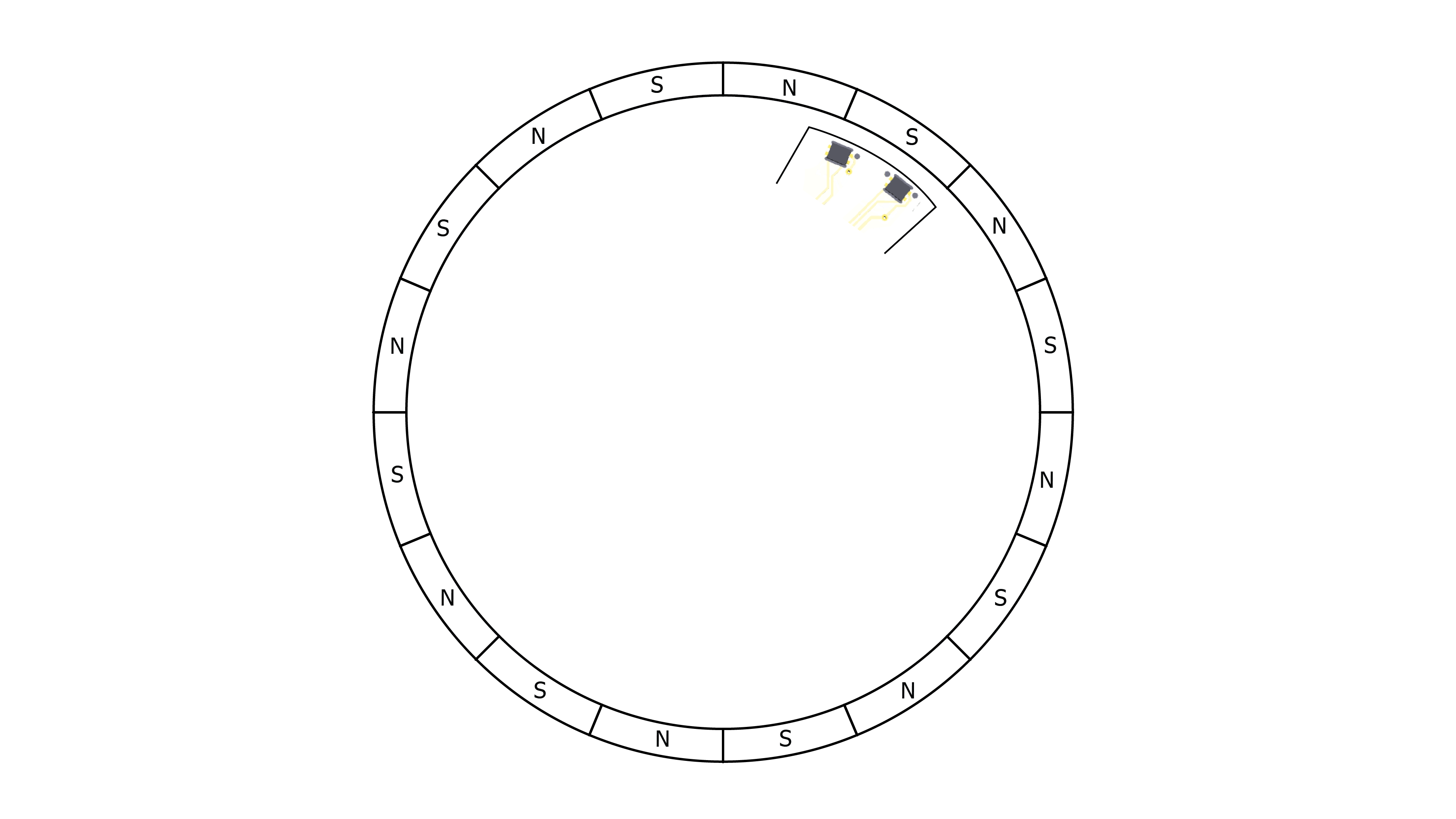
The setup with 2 Halls sensors and the magnet ring:
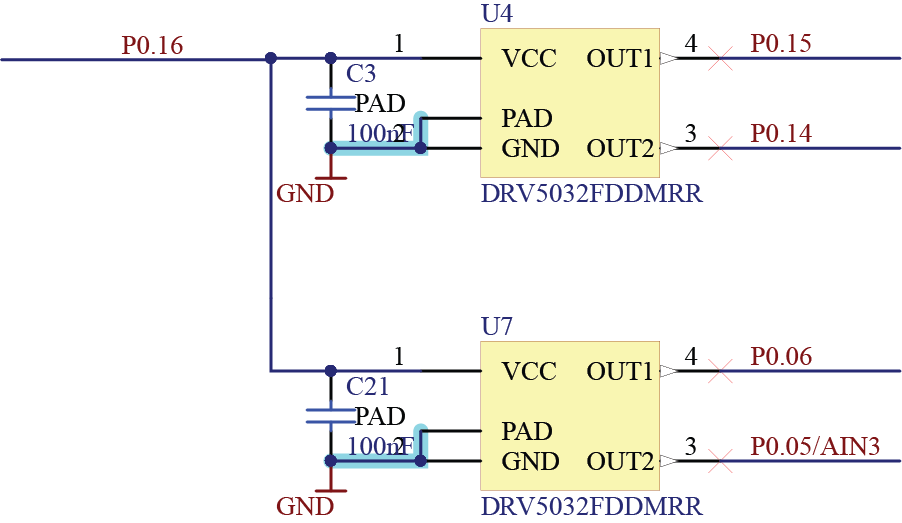
Wiring of the hall sensors, P16 used for power.:
I have 2 issues in my design:
- On faster turns of the magnet (180 degrees rotation in about 300ms), the encoders generate very unstable interrupts in my uC. Usually it just stalls at HIGH. When the fast rotation stops it finally gives a “correct measurement” of the final magnet placement.
- The setup seems to generate more unstable signals after a period of time – when we build a fresh prototype it runs smooth, but after 30minutes it deteriorates to more unreliable signal.
My own considerations:
Sample frequency may be a bit low for my application (4 full amplitudes in 0.3 sec is 26Hz) – however this does not explain the stalling – as I understand it a lower sample rate would still give me both high and low and not just stall on high
Can hall sensors get saturated? It looks like they somehow ‘saturate’ at higher speeds and over time – like the sensors become sluggish.

