Other Parts Discussed in Thread: MMWAVE-SDK, AWR1642
Hi,
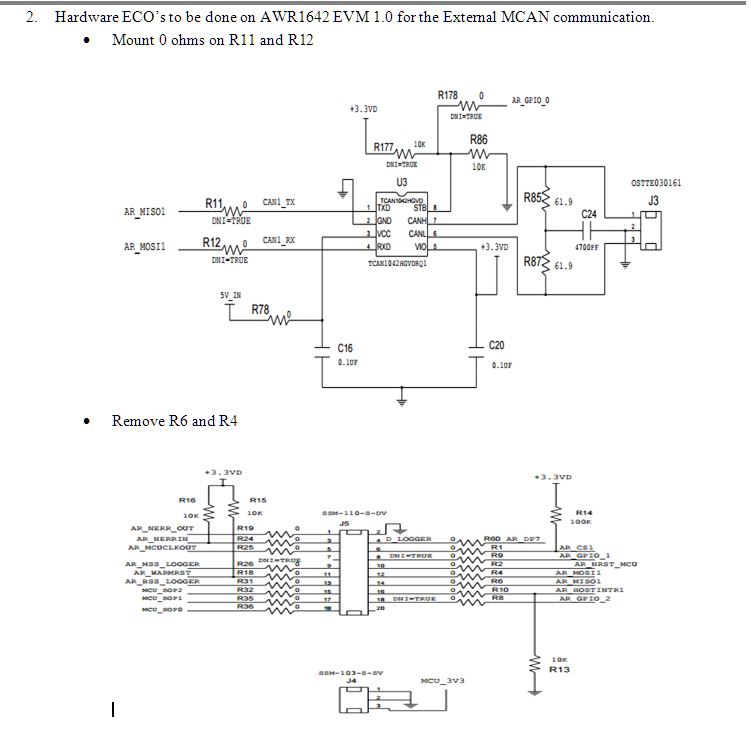
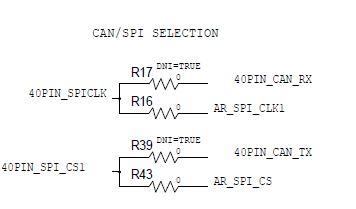
I'm trying the CAN FD example on AWR1642BOOST board, but it is always reporting bit 0 error.
I've tried following
- checked the CAN pins in multimeter as well as in DSO, the CAN bus always stays recessive.
- changed the CAN FD configuration to "CANFD_MCANFrameType frameType = CANFD_MCANFrameType_CLASSIC;"
- made the STB pin of CAN transceiver which is connected to GPIO_0 as low.
- tried with two boards connected to the same CAN bus
Only the loopback examples are working. EVM-EVM and RX/TX examples are reporting the bit 0 error.
Thanks and regards,
Chidvilas