


Hi Guys.
I'm Wonjin Eom and I want to implement ROS point cloud visualizer lab.
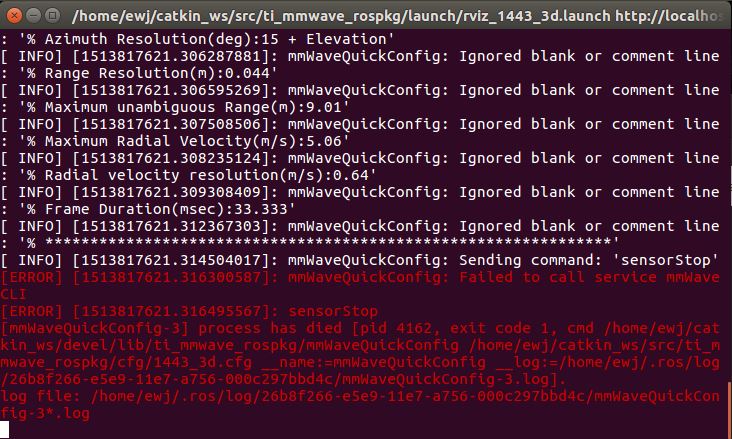
I did everything in the ROS user's guide but when I run Rviz program, an error message and there's no point in the empty grid space.
I don't know what's wrong.

Hi Guys.
I'm Wonjin Eom and I want to implement ROS point cloud visualizer lab.
I did everything in the ROS user's guide but when I run Rviz program, an error message and there's no point in the empty grid space.
I don't know what's wrong.

