Other Parts Discussed in Thread: TDC7200EVM, TDC7200, MSP-EXP430F5529LP, MSP430F5529
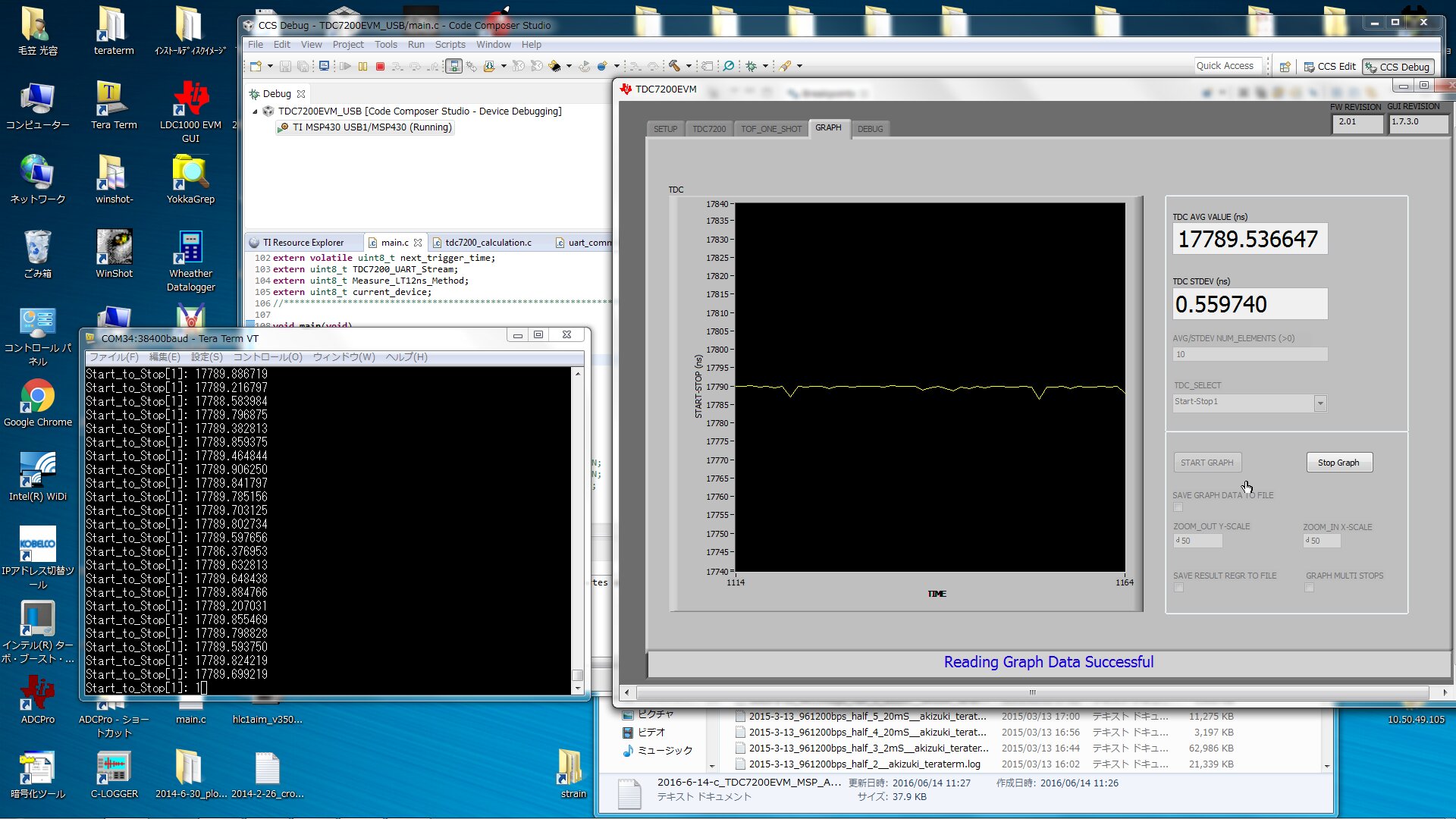
I can save the time span data to file in TDC7200EVM GUI all right.
But, there is one porblem.
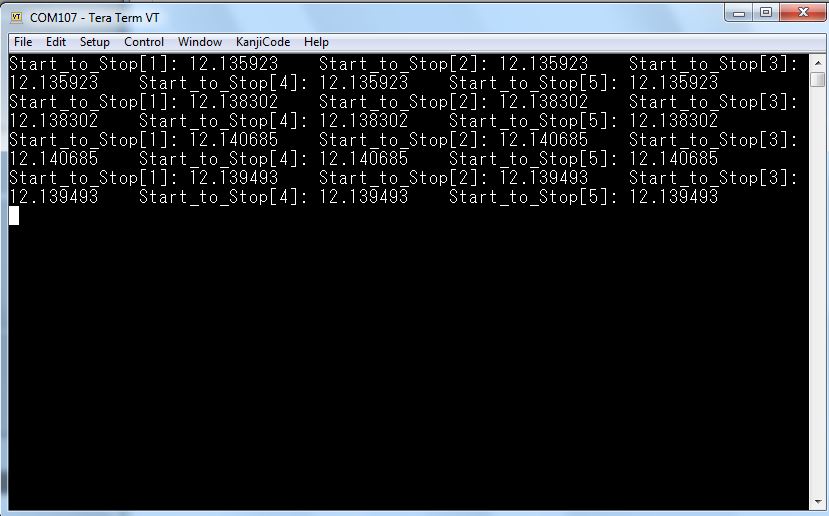
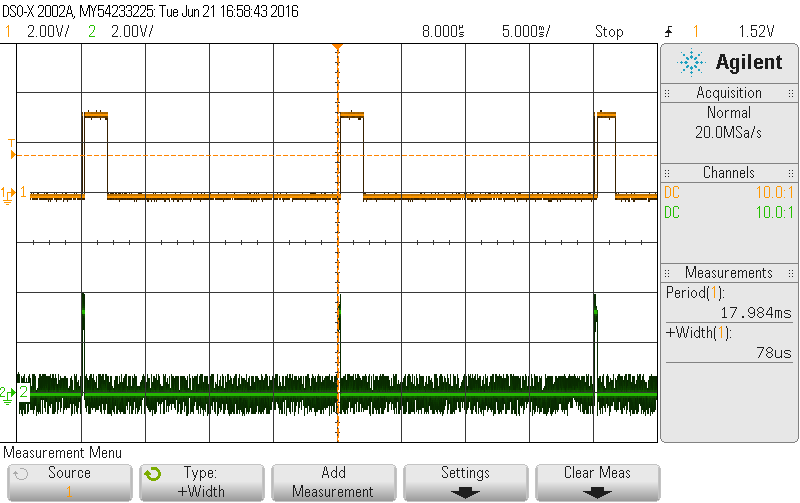
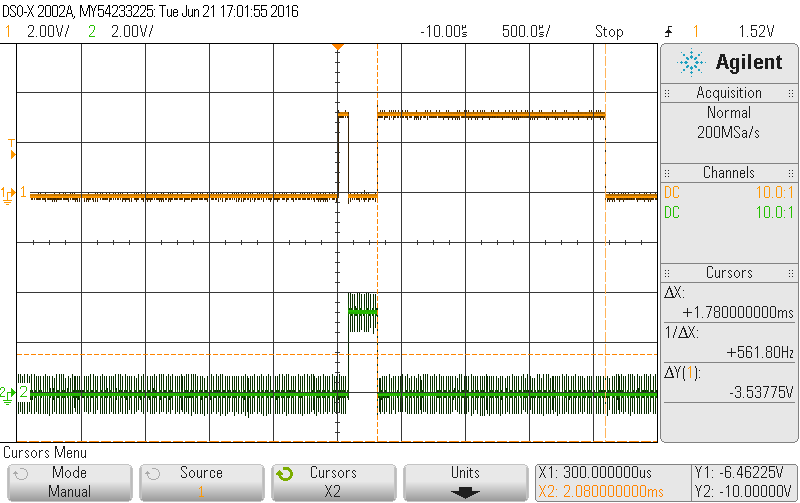
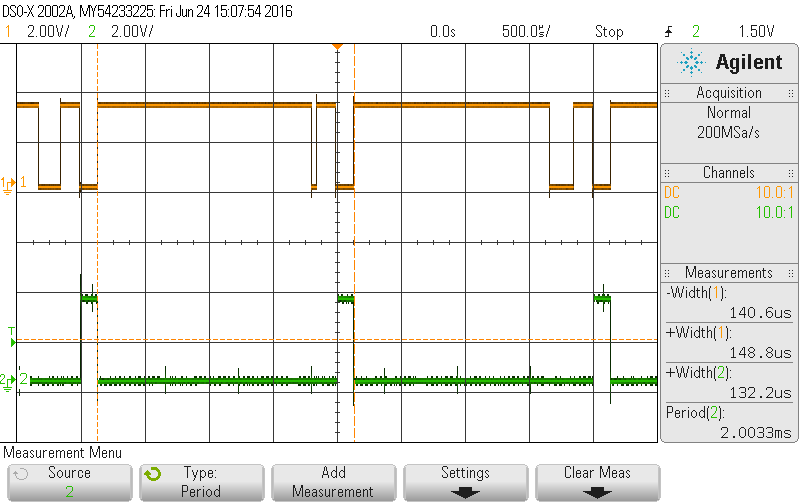
I want to save the time span data (around 17uS) every 20uS.
I checked the log file and found only 5 data per second = every 200mS.
I found the setting but the minimum setting is 100mS.
Would you please show me how to save the time span data every 20uS = 50ksps?
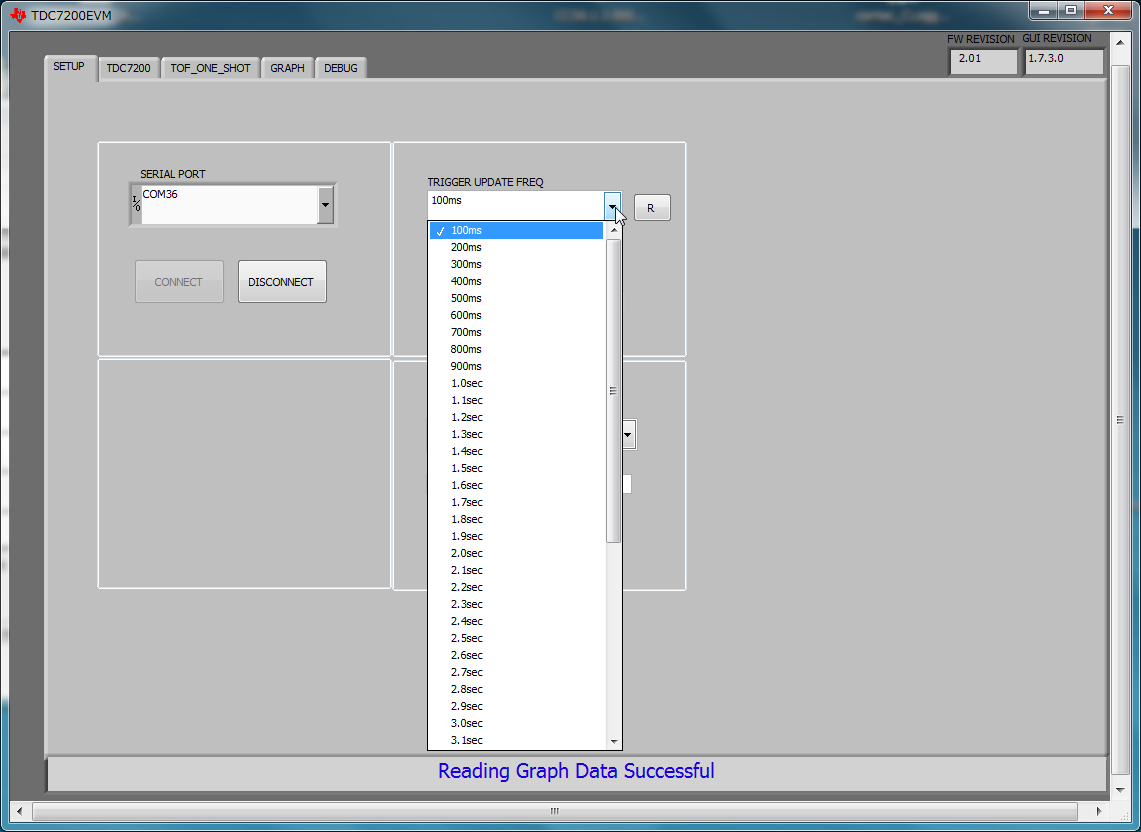
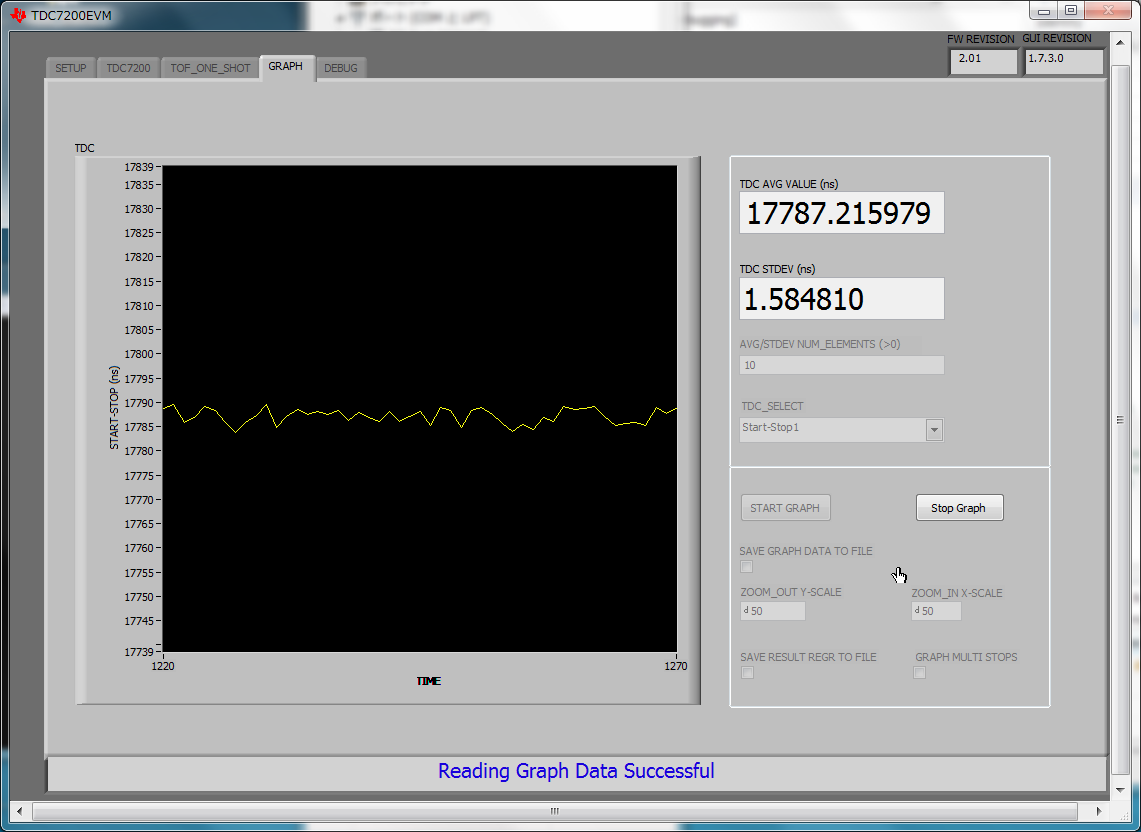
Trigger update freq = 100mS minmum = 10sps max
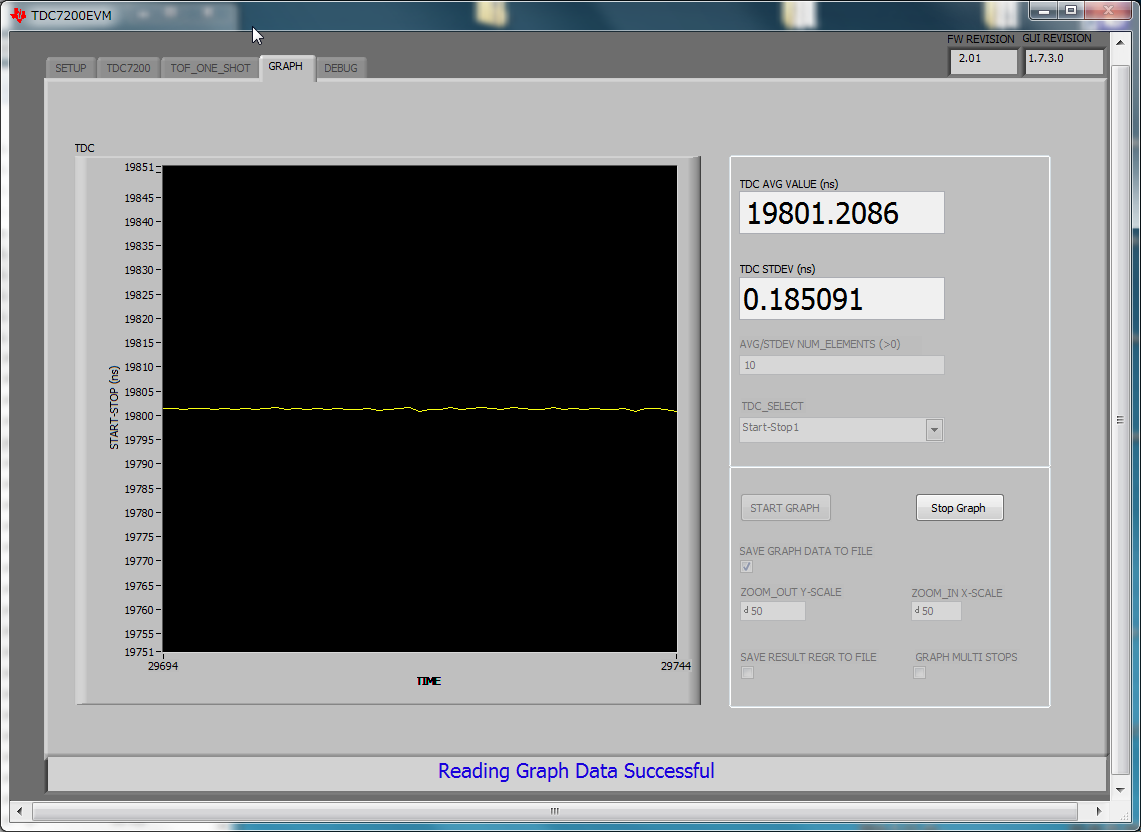
Save graph data to file.