


Dear ,
I got the point cloud data with mmwave demo visualizer and processed it using python with code parserTLV.py downloaded from TI forum.
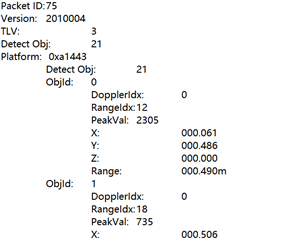
Then I got the file .txt , I want to know the meaning of these parameters:DopplerIdx,RangeIdx,PeakVal,X,Y,Z?
How can I distinguish whether ObjId belongs to a goal?
.
Thank you!
