Hello,
I try to reproduce the results obtained with the BOOSTXL-PGA460 modified for short range measurements (R38 10K and C15 680pF). But I can't achieve same performance.
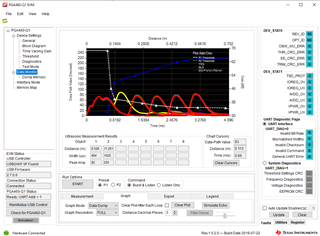
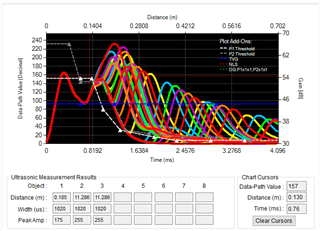
With P1, I get echo/resonance at about 130µs and get the following results with distance between 12cm ~60cm:
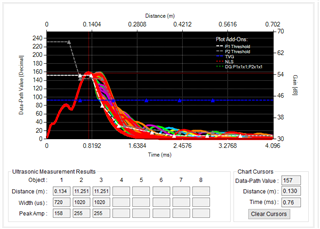
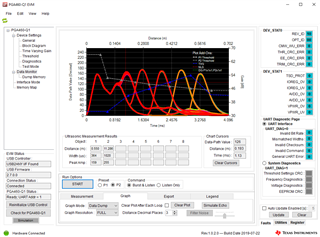
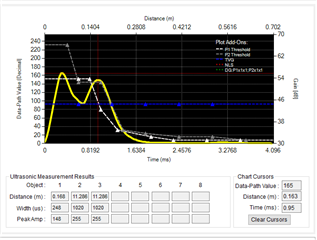
With P2, I get echo/resonance at 300µs and 950µs (first plot is without obstacle and second with distance varying from 12cm to ~60cm):
Do you have any idea where this "parasitic echo" comes from?
Best regards