Hi Team,
Our customer is using IWR6843ISK-ODS with Nvidia Jetson nano board for 3D people counting but he couldn't launch the sensor because of the errors below.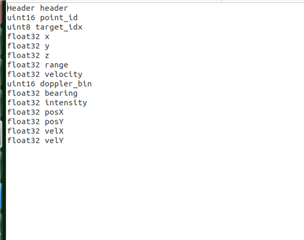
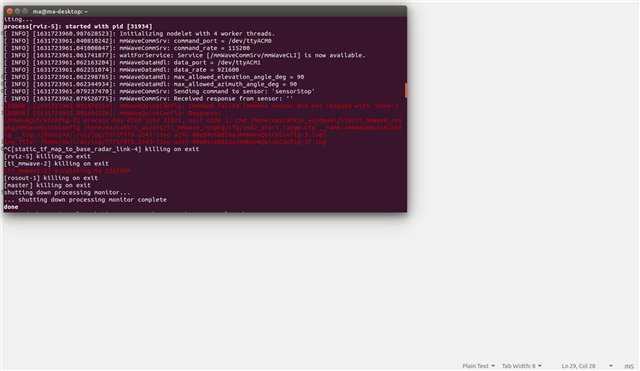
Here are the steps he have done so far:
1. I Re-flashed my sensor for 3D people counting with binary: '3D_people_count_68xx_demo.bin'
2. I have modified DataHandlerClass.cpp for TLV format of people counting.
3. I have created my own ROS msg structure that will publish the tracking info as shown.
4. I have Modified mmWave.h to support the people counting demo.
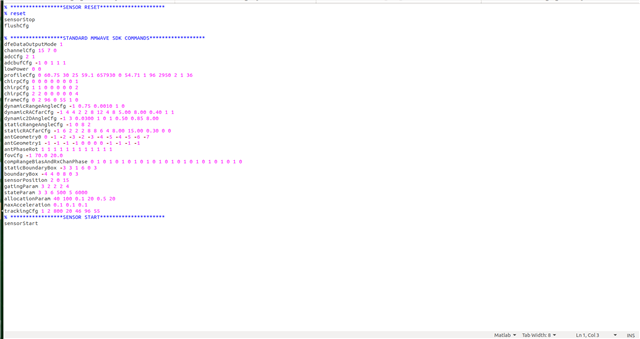
5. I modified my cfg file for 3D people counting as shown
6. I modified desired .launch file to point to new .cfg.
DataHandler and cfg with launch.zipmmWave.h
Regards,
Danilo