Other Parts Discussed in Thread: BOOSTXL-TUSS4440, TUSS4440, TUSS4470, PGA460
Hi there,
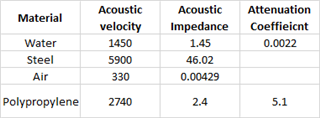
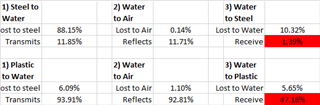
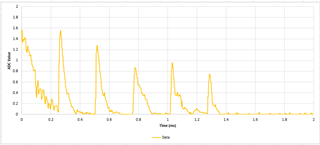
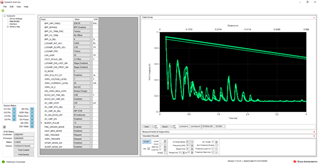
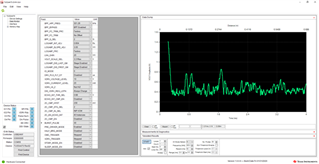
I've been doing some tests with the BOOSTXL-TUSS4470 on my application and I'm finding that I'm just not getting any TOF back. The application is a steel container and I'm trying to measure the water level. I'm using a 1MHz PZT and using only mono static and setting VDRV to 20V.
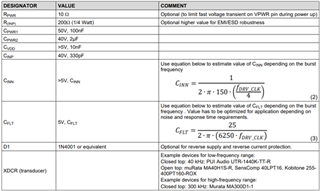
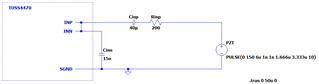
I was looking to attach a centre tapped transformer to trial the transformer drive mode and increase the drive voltage substantially but the coilcraft WA8351-AL in the designs BOM is out of stock and I'm eager to get trial it out. Do you know where I can source something similar? The only alternatives I can see on the market are stated for around 50kHz and not the much higher 1MHz (though I could reduce this). Or would you say I have to get the BOOSTXL-TUSS4440 instead and use this? I'm thinking if the difference is just the transformer it's difficult to warren the £185 for the BOOSTXL-TUSS4440 when I have the 4470 one.
Thank you in advance