Hi TI experts,
I had built a ccs project for SBL , the sbl source code is load from "ti\mmwave_sdk_03_05_00_04\packages\ti\utils\sbl", Then the environment settings refer to the can sbl lab of "mmwave_automotive_toolbox_3_4_0".
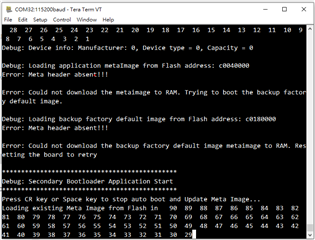
The ccs Version is "9.3.0.00012",I have successfully created a bin file and burned it into the board "awr6843isk ES2.0" ,it seem does't work as described in the SBL_design.pdf guide.
Could you please help me check what is wrong with the project setting. or provide me any SBL software that works normally on the awr6843isk board.
follow is my full projcet & setting.
thanks a lot,
Allen