Other Parts Discussed in Thread: TIPD184,
Hi,
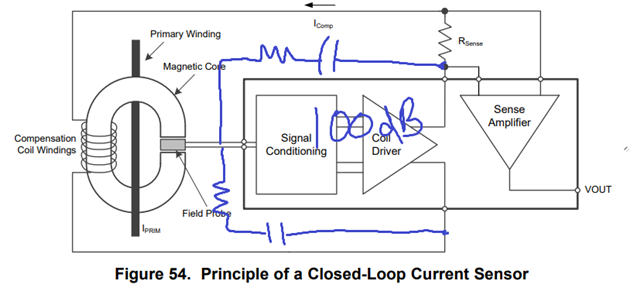
I have set up a current measurement circuit based on TIPD184. It seems to work fine.
However now I would like to modifiy the compensation circuit to check how steady-state accuracy and bandwidth are affected.
Furthermore I would also like to check the measurement result when switching of the current spinning property.
In the datasheet of the DRV411 it is mentioned that Gain and Compensation Frequency can be set by selecting RF1, CF1 and RF2, CF2.
However since the resistor and capacitor are connected in series according to Fig. 57 of the datasheet, I am unaware of how the gain and compensation frequency can be calculated according to RF1, CF1, RF2 and CF2.
As a first step, I am thinking of getting the same gains which can be set by adjusting GSEL1 and GSEL2, while switching off the Spinning property.
Could you give me some guidance on my plan or refer any helpful documents?
Thanks a lot!