I've found that the ros driver has a tendency to drop messages, and I theorize perhaps it's related to overheating?
I've run 2 sets of data collection, only running the radar in two different mounting configurations. See the comparison of the two here, clearly the first one has a lot of dropped messages
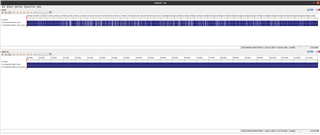
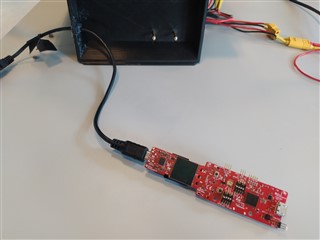
The only difference between these two sets, aside from run time, is the mounting configuration. The top data set was mounted in a 3d printed case of sorts on a pair of standoffs:

Whereas the lower data set was captured with the sensor sitting on top of the table, "exposed" to ambient environment
Is it likely this is a heating issue? How should we approach this sampling inconsistency?