Hello,
We are currently using TMAG5170-Q1 for an automotive application.
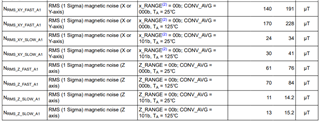
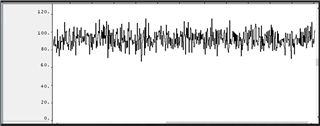
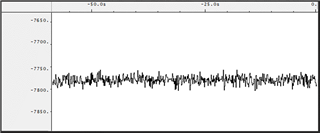
1. We observe that though the magnet is placed steady over the sensor, the x, y, and z magnetic field readings fluctuate.
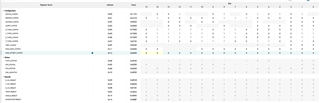
Attached is the snapshot of the configuration of the sensor .
2. Also, when there is no magnet placed in the vicinity of the sensor, the x, y, z sensor values fluctuate over the full range starting from 0 - 65536 (both negative and positive data is interpreted)
Please let us know how these readings can be stabilized to get steady magnetic field values.
Magnet Details:
Material: N35H
Shape: Rectangle
Thank you,
Aditya