Dear All,
I am working on project of three phase hall effect sensor replace to three LDC0851 IC with three signal output H1,H2 and H3.
The main application is to calculate motor speed. In our case we are using target disk contains 5 conductive regions,
each covering 36° and separated by gaps of 36°.
For calculation speed we are place three sensor on circular PCB with 120 degree each other.
Below are our observations.
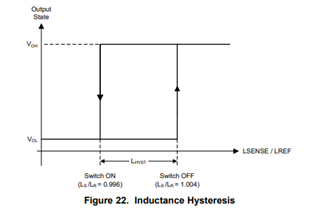
1. We are not getting 50% duty cycle. Its around 60% or varies.
2. 120 degree phase shift is not achieved. The phase shift is vary 110 to 140 degree.
Please confirm can we achieve below point using LDC0851 IC.
1. Maximum RPM speed approximate 7500 to 8000 rpm.
2. Sensor duty cycle accuracy : 50%, + / - 1%.
3. Phase shift accuracy : 120 degree electric, + / - 1 degree.
4. Sensor period accuracy : + / - of coil diameter(in degree)