Hi,
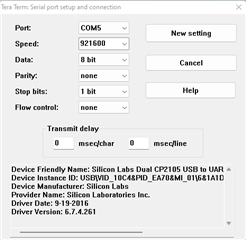
I tried to run sense and direct on the python mmwave visualiser GUI
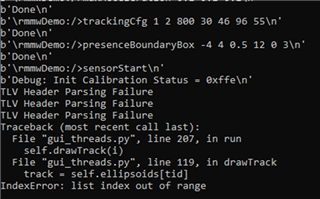
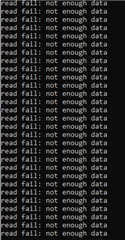
I have received the following error message:
Python is 64 bit
Python version: sys.version_info(major=3, minor=6, micro=0, releaselevel='final', serial=0)
configType Changed to: Long Range People Detection
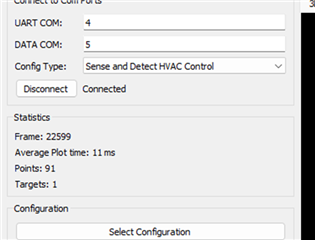
configType Changed to: Sense and Detect HVAC Control
Parser type: Sense and Detect HVAC Control
Connected
{'startFreq': 60.0, 'numLoops': 64, 'numTx': 3, 'sensorHeight': 3, 'maxRange': 10, 'az_tilt': 0, 'elev_tilt': 0, 'idle': 93.0, 'adcStart': 7.0, 'rampEnd': 40.0, 'slope': 100.0, 'samples': 192.0, 'sampleRate': 6000.0}
Setting box 0 invisisble
Setting box 1 invisisble
b'% ***************************************************************\n'
b'Skipped\n'
b'\rmmwDemo:/>% Created for SDK ver:03.06\n'
b'Skipped\n'
b'\rmmwDemo:/>% Created using Visualizer ver:3.6.0.0\n'
b'Skipped\n'
b'\rmmwDemo:/>% Frequency:60\n'
b'Skipped\n'
b'\rmmwDemo:/>% Platform:xWR68xx\n'
b'Skipped\n'
b'\rmmwDemo:/>% Scene Classifier:best_range_res\n'
b'Skipped\n'
b'\rmmwDemo:/>% Azimuth Resolution(deg):15\n'
b'Skipped\n'
b'\rmmwDemo:/>% Range Resolution(m):0.047\n'
b'Skipped\n'
b'\rmmwDemo:/>% Maximum unambiguous Range(m):7.29\n'
b'Skipped\n'
b'\rmmwDemo:/>% Maximum Radial Velocity(m/s):4.67\n'
b'Skipped\n'
b'\rmmwDemo:/>% Radial velocity resolution(m/s):0.3\n'
b'Skipped\n'
b'\rmmwDemo:/>% Frame Duration(msec):250\n'
b'Skipped\n'
b'\rmmwDemo:/>% RF calibration data:None\n'
b'Skipped\n'
b'\rmmwDemo:/>% Range Detection Threshold (dB):15\n'
b'Skipped\n'
b'\rmmwDemo:/>% Doppler Detection Threshold (dB):15\n'
b'Skipped\n'
b'\rmmwDemo:/>% Range Peak Grouping:enabled\n'
b'Skipped\n'
b'\rmmwDemo:/>% Doppler Peak Grouping:enabled\n'
b'Skipped\n'
b'\rmmwDemo:/>% Static clutter removal:disabled\n'
b'Skipped\n'
b'\rmmwDemo:/>% Angle of Arrival FoV: Full FoV\n'
b'Skipped\n'
b'\rmmwDemo:/>% Range FoV: Full FoV\n'
b'Skipped\n'
b'\rmmwDemo:/>% Doppler FoV: Full FoV\n'
b'Skipped\n'
b'\rmmwDemo:/>% ***************************************************************\n'
b'Skipped\n'
b'\rmmwDemo:/>sensorStop\n'
b'Done\n'
b'\rmmwDemo:/>flushCfg\n'
b'Done\n'
b'\rmmwDemo:/>dfeDataOutputMode 1\n'
b'Done\n'
b'\rmmwDemo:/>channelCfg 15 5 0\n'
b'Done\n'
b'\rmmwDemo:/>adcCfg 2 1\n'
b'Done\n'
b'\rmmwDemo:/>adcbufCfg -1 0 1 1 1\n'
b'Error: Invalid usage of the CLI command\n'
b'\rError -1\n'
b'\rmmwDemo:/>profileCfg 0 60 93 7 40 0 0 100 1 192 6000 0 0 158\n'
b'Done\n'
b'\rmmwDemo:/>chirpCfg 0 0 0 0 0 0 0 1\n'
b'Done\n'
b'\rmmwDemo:/>chirpCfg 1 1 0 0 0 0 0 4\n'
b'Done\n'
b'\rmmwDemo:/>frameCfg 0 1 32 0 250 1 0\n'
b'Done\n'
b'\rmmwDemo:/>lowPower 0 0\n'
b'Done\n'
b'\rmmwDemo:/>guiMonitor -1 1 1 0 0 0 1\n'
b'Done\n'
b'\rmmwDemo:/>cfarCfg -1 0 2 8 4 3 0 15 1\n'
b'Error: Invalid usage of the CLI command\n'
b'\rError -1\n'
b'\rmmwDemo:/>cfarCfg -1 1 0 8 4 4 1 15 1\n'
b'Error: Invalid usage of the CLI command\n'
b'\rError -1\n'
b'\rmmwDemo:/>multiObjBeamForming -1 1 0.5\n'
b"'multiObjBeamForming' is not recognized as a CLI command\n"
b'\rmmwDemo:/>clutterRemoval -1 0\n'
b"'clutterRemoval' is not recognized as a CLI command\n"
b'\rmmwDemo:/>calibDcRangeSig -1 0 -5 8 256\n'
b"'calibDcRangeSig' is not recognized as a CLI command\n"
b'\rmmwDemo:/>extendedMaxVelocity -1 0\n'
b"'extendedMaxVelocity' is not recognized as a CLI command\n"
b'\rmmwDemo:/>bpmCfg -1 0 0 1\n'
b"'bpmCfg' is not recognized as a CLI command\n"
b'\rmmwDemo:/>lvdsStreamCfg -1 0 0 0\n'
b"'lvdsStreamCfg' is not recognized as a CLI command\n"
b'\rmmwDemo:/>compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0\n'
b'Done\n'
b'\rmmwDemo:/>measureRangeBiasAndRxChanPhase 0 1.5 0.2\n'
b"'measureRangeBiasAndRxChanPhase' is not recognized as a CLI command\n"
b'\rmmwDemo:/>CQRxSatMonitor 0 3 4 99 0\n'
b"'CQRxSatMonitor' is not recognized as a CLI command\n"
b'\rmmwDemo:/>CQSigImgMonitor 0 95 4\n'
b"'CQSigImgMonitor' is not recognized as a CLI command\n"
b'\rmmwDemo:/>analogMonitor 0 0\n'
b"'analogMonitor' is not recognized as a CLI command\n"
b'\rmmwDemo:/>aoaFovCfg -1 -90 90 -90 90\n'
b"'aoaFovCfg' is not recognized as a CLI command\n"
b'\rmmwDemo:/>cfarFovCfg -1 0 0 7.20\n'
b"'cfarFovCfg' is not recognized as a CLI command\n"
b'\rmmwDemo:/>cfarFovCfg -1 1 -4.69 4.69\n'
b"'cfarFovCfg' is not recognized as a CLI command\n"
b'\rmmwDemo:/>calibData 0 0 0\n'
With the error message, I cannot run the lab.
Thank you for assistance.