



Other Parts Discussed in Thread: TMAG5170
Dear Sir, Madam,
I recently asked you more details about the temperature drift of the TMAG5170 but I need more help to understand correctly this parameter.
I saw on the datasheet the temperature drift is worth maximum 2,8% between 25°C and 125°C and maximum 4,3% between -40°C and 25°C. I don't understand what does this percentage represents.
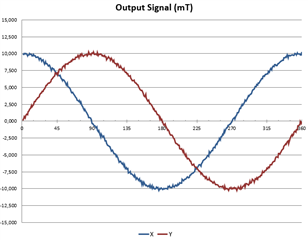
For example, the sensor works at 25°C with an input range of 25mT, it is supplied in 5V, the maximum magnetic field measured is about 10mT (see the curve below).
In theory, if the systems works at -40°C, what do we have to do with the temperature drift of 4,3% :
- Do we have to add 4,3% of 10mT (so 0,43mT) to all magnetic fields measured ?
- Do we have to add 4,3% of 25mT (so 1,075mT) to all magnetic fields measured ?
- Do we have to add 4,3% of the measured value for each value (for example at 45° both magnetic fields are worth about 7,5mT so we add 7,5*4,3% = 0,3225mT ; at 30° the magnetic field in Y is worth about 5mT so we add 5*4,3% = 0,215mT, and it is worth about 8mT in X so we add 8*4,3% = 0,344mT ; ...) ?
- Is there an other thing ?
Best regards.
Arnaud


