Other Parts Discussed in Thread: AWR6843
Hi,
I tried the prebuild binary of CPD demo at C:\ti\radar_toolbox_1_30_00_05\source\ti\examples\InCabin_Sensing\AWR6843_CPD_with_Classification\prebuilt_binaries on AWR6843AOPEVM.
I tried below sensorPosition and it works ok.
sensorPosition 0 1.2 1.1 90 -90 0
Then I rotated the sensor with 180 degree again and set as sensorPosition 0 1.2 1.1 90 90 0. It can't work well.
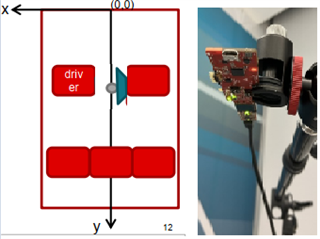
Sensor setup is as below.

Below is recorded with only one person moving in 2nd row. You can also see moving object in 1st row also with same moving direction. It is abnormal.
Would you pls help to try and fix this?
Thanks,
Chris