A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
For the HDC1050 you can use the same reference source code you have used for the HDC1000.
HDC1050 and HDC1000 are software compatible, with the only difference that HDC1050 doesn't have the DRDYn interrupt pin. For this reason in the HDC_measurement() function in hdc1000.c file, you should replace the follow instruction:
//Wait for nDRDY_RDY pin to signal measurement is ready to read while(HDC_data_received == false);
with a delay of 40msec:
//Wait 40msec before that the measurement is ready to be read delay(40); // 40msec
Please let me know if this reply to your question or if you need further information.
/*
* Copyright (c) 2014-2015, Texas Instruments Incorporated - http://www.ti.com
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*****************************************************************************
* INCLUDES
*/
#include <ti/drivers/I2C.h>
#include <ti/drivers/PIN.h>
#include <ti/drivers/pin/PINCC26XX.h>
#include "Board.h"
#include "hdc1000.h"
#include "string.h"
/*****************************************************************************
* GLOBAL VARIABLES
*/
extern PIN_Handle DONE_handle;
/*****************************************************************************
* LOCAL FUNCTION PROTOTYPES
*/
/*****************************************************************************
* LOCAL VARIABLES
*/
//I2C variables
I2C_Handle AppI2cHandle;
I2C_Params AppI2cParams;
I2C_Transaction i2cTransaction;
uint8_t txBuf[3] = {0};
bool status = false;
//GPIO variables
static PIN_State nDRDY_state;
static PIN_Handle nDRDY_handle;
PIN_Config nDRDYPinTable[] = {
nDRDY_HDC | PIN_INPUT_EN | PIN_NOPULL | PIN_HYSTERESIS,
PIN_TERMINATE
};
//HDC variables
volatile bool HDC_data_received = false;
/*****************************************************************************
* FUNCTIONS
*/
/*****************************************************************************
* @brief HWI interrupt function to trigger on nDRDY pin
*
* @return None
******************************************************************************/
void nDRDY_HwiFxn(PIN_Handle hPin, PIN_Id pinId){
if(pinId == nDRDY_HDC){
HDC_data_received = true;
}
}
/*****************************************************************************
* @brief Initialize HDC I2C and GPIO driver
*
* @return None
******************************************************************************/
void HDC_peripheral_init(void){
//Initialize I2C
I2C_Params_init(&AppI2cParams);
AppI2cParams.transferMode = I2C_MODE_BLOCKING;
AppI2cParams.transferCallbackFxn = NULL;
AppI2cHandle = I2C_open(CC2650_I2C0, NULL);
if(AppI2cHandle == NULL){
/* Error opening I2C */
}
//Initialize nDRDY_HDC
nDRDY_handle = PIN_open(&nDRDY_state, nDRDYPinTable);
PIN_registerIntCb(nDRDY_handle, &nDRDY_HwiFxn);
PIN_setConfig(nDRDY_handle, PIN_BM_IRQ, nDRDY_HDC | PIN_IRQ_NEGEDGE);
}
/*****************************************************************************
* @brief Initialize HDC1000 and configure the temp/humidity resolution
*
* @return None
******************************************************************************/
void HDC_config_init(void){
uint8_t tries = 0;
status = false;
while(status == false){
//Write to configuration register
txBuf[0] = CONFIGURATION_ADDRESS;
txBuf[1] = TEMP_RH_11BIT_MSB;
txBuf[2] = TEMP_RF_11BIT_LSB;
i2cTransaction.writeBuf = txBuf;
i2cTransaction.writeCount = 3;
i2cTransaction.readBuf = 0;
i2cTransaction.readCount = 0;
i2cTransaction.slaveAddress = HDC1000_ADDRESS;
status = I2C_transfer(AppI2cHandle, &i2cTransaction);
tries++;
if(status == false){
//ERROR: HDC is not responding
//Tried 5 times, power off the uC
if(tries == 5){
PIN_setOutputValue(DONE_handle, DONE, 1);
}
//If less than 5 times, wait 1ms and try again
CPUdelay(10000);
}
}
}
/*****************************************************************************
* @brief Return the HDC1000 manufacturer ID
*
* @return None
* @param buffer will hold manufacturer ID
******************************************************************************/
void HDC_revision(uint8_t* buffer){
status = false;
txBuf[0] = MANUFACTURER_ID_ADDRESS;
i2cTransaction.writeBuf = txBuf;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = buffer;
i2cTransaction.readCount = 2;
i2cTransaction.slaveAddress = HDC1000_ADDRESS;
status = I2C_transfer(AppI2cHandle, &i2cTransaction);
if(status == false){
/* Error */
}
}
/*****************************************************************************
* @brief Return the configuration register content
*
* @return None
* @param buffer will contain configuration register content
******************************************************************************/
void HDC_configuration_read(uint8_t* buffer){
status = false;
txBuf[0] = CONFIGURATION_ADDRESS;
i2cTransaction.writeBuf = txBuf;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = buffer;
i2cTransaction.readCount = 2;
i2cTransaction.slaveAddress = HDC1000_ADDRESS;
status = I2C_transfer(AppI2cHandle, &i2cTransaction);
if(status == false){
/* Error */
}
}
/*****************************************************************************
* @brief Start temperature and humidity measurement, wait for the
* nDRDY_HDC pin to go low indicating a measurement is ready
* for reading, read temperature and humidity registers
*
* @return None
* @param buffer will contain both temperature and humidity measurement
* [0] Temperature MSB
* [1] Temperature LSB
* [2] Relative humidity MSB
* [3] Relative humidity LSB
******************************************************************************/
void HDC_measurement(uint8_t* buffer){
status = false;
HDC_data_received = false;
txBuf[0] = TEMPERATURE_ADDRESS;
//Write data to TEMP register to trigger a measurement
i2cTransaction.writeBuf = txBuf;
i2cTransaction.writeCount = 1;
i2cTransaction.readBuf = buffer;
i2cTransaction.readCount = 0;
i2cTransaction.slaveAddress = HDC1000_ADDRESS;
status = I2C_transfer(AppI2cHandle, &i2cTransaction);
if(status == false){
/* Error */
}
//Wait for nDRDY_RDY pin to signal measurement is ready to read
while(HDC_data_received == false);
//Read data
status = false;
i2cTransaction.writeBuf = txBuf;
i2cTransaction.writeCount = 0;
i2cTransaction.readBuf = buffer;
i2cTransaction.readCount = 4;
i2cTransaction.slaveAddress = HDC1000_ADDRESS;
status = I2C_transfer(AppI2cHandle, &i2cTransaction);
if(status == false){
/* Error */
}
}
Hello:
Just out of curious , if I want to see HDC1050's data , where I can add
System_printf("Temperature is %d (C)\n", temperature) ;
System_printf("Humidity is %d \n", humidity) ;
Thank you.
Hi Tzuyu,
I found a similar error due to the fact that the file board.h is not in the same directory of hdc1000.c.
Please modify the line39 in hdc1000.c from #include "Board.h" to #include "../Board.h" and let me know if this work.
Best regards,
Carmine
As I know, there is no similar source code reference for OPT3001. You should be able to revise my source code for HDC1050 and make it work for OPT3001.
if (I2C_transfer(i2c, &i2cTransaction)) {
val = rxBuffer[0];
rawdata = (val << 8) | (val>>8 &0xFF);
m = rawdata & 0x0FFF;
e = (rawdata & 0xF000) >> 12;
lux = m * (0.01 * exp2(e)); //show exp2 declared implicitly ? You have to include math.h
System_printf("light %u: %f (lx)\n", i, lux);
You mean create two taskFxn , for example , read HDC1050 is call
void taskHDC1050Fxn(UArg arg0, UArg arg1){....} and read OPT3001 is call
void taskOPT3001Fxn(UArg arg0, UArg arg1){.....} or ?
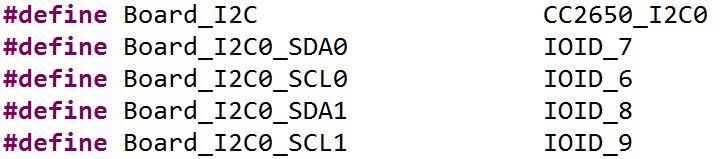
By the way , If I want to disperse two sensors , for example , HDC1050 connect SDA0 and SCL0 , but OPT3001 connect to SDA1 and SCL1 , not use the same I2C pin in common , what do I do ?














{kind=link}
{kind=link}
{kind=link}
{kind=link}